关于人体模型树:
只要打开“人体模型”(Manikin) 选项卡,人体模型树就会显示在模型树上方的左上角处。如果人体模型树处于折叠状态,请单击 “人体模型树”(Manikin Tree) 将其展开。
可在人体模型树或图形窗口中找到特定的人体模型段。在人体模型树中选择人体模型或人体模型段的同时也会选中图形窗口中的相关项。在图形窗口中选择人体模型或人体模型段的同时也会在人体模型树中进行相同的选择。“人体模型”(Manikin) 选项卡处于打开状态时,默认选择过滤器为“人体模型对象”(Manikin Objects),以便于在图形窗口中选择人体模型段。
设计元件在“人体模型树”中显示如下:
•人体模型段组节点 (例如手部) 会显示其子节点 (例如手指) 的状态:
◦当所有段均处于锁定、固定或锁定和固定组合状态时,父节点会显示完全锁定状态。
◦当一个或多个 (但并非所有) 段处于锁定、固定或锁定和固定组合状态时,父节点会显示部分锁定状态。
•要访问快捷菜单,请右键单击“人体模型树”中的图元或选择某个人体模型,就像在任何 Creo 设计中执行操作一样。
人体模型树中会显示以下图标:
人体模型树
•  - 展开或折叠人体模型树
- 展开或折叠人体模型树
•  - 人体模型根节点
- 人体模型根节点
快照
•  - 快照节点
- 快照节点
•  - 快照
- 快照
•  - 活动快照
- 活动快照
人体模型
•  - 每个人体模型的人体模型节点
- 每个人体模型的人体模型节点
•  - 已锁定人体模型
- 已锁定人体模型
•  - 部分锁定人体模型
- 部分锁定人体模型
人体模型约束
•  - 包含人体模型放置约束、到达约束、查看约束和用户定义固定约束的人体模型约束节点
- 包含人体模型放置约束、到达约束、查看约束和用户定义固定约束的人体模型约束节点
•  - 固定约束
- 固定约束
•  - 查看约束
- 查看约束
•  - 到达约束
- 到达约束
•  - 禁用所有放置连接
- 禁用所有放置连接
人体模型段组
从上到下、从头到脚排列。
•  - 人体模型段组
- 人体模型段组
•  - 已锁定人体模型段组
- 已锁定人体模型段组
•  - 部分锁定人体模型段组
- 部分锁定人体模型段组
人体模型段
•  - 人体模型段
- 人体模型段
•  - 完全锁定的人体模型段,在人体模型段的所有 DOF (自由度) 均处于锁定状态时显示
- 完全锁定的人体模型段,在人体模型段的所有 DOF (自由度) 均处于锁定状态时显示
•  - 部分锁定人体模型段,在至少一个但并非所有人体模型段处于选定状态时显示
- 部分锁定人体模型段,在至少一个但并非所有人体模型段处于选定状态时显示
•  - 已固定人体模型段
- 已固定人体模型段
•  - 头部段组中的视线
- 头部段组中的视线
•  - 头部段组中的完全锁定视线
- 头部段组中的完全锁定视线
•  - 头部段组中的部分锁定视线
- 头部段组中的部分锁定视线
•  - 头部段组中的固定视线
- 头部段组中的固定视线
快捷方式命令
单击快照节点以访问浮动工具栏命令,或右键单击以访问浮动工具栏和快捷菜单命令。
•“创建快照”(Create Snapshot) - 创建快照。
单击快照以访问浮动工具栏命令,或右键单击以访问浮动工具栏和快捷菜单命令。
•“应用”(Apply) - 应用快照。
•“更新”(Update) - 更新快照以保持屏幕上当前所示人体模型和约束的位置。
•“重命名”(Rename) - 重命名快照。
•“删除”(Delete) - 删除快照。
•“修复”(Repair) - 将快照中指定的约束重新连接至人体模型,然后更新快照,以保持屏幕上当前所示人体模型和约束的位置。修复与相继单击 “重新连接”(Reconnect) 和 “更新”(Update) 这一过程完全相同。
•“重新连接”(Reconnect) - 将快照中指定的约束重新连接至人体模型。
单击人体模型节点以访问浮动工具栏命令,或右键单击以访问浮动工具栏和快捷菜单命令。
•“编辑人体模型”(Edit Manikin) - 打开“人体模型编辑器”(Manikin Editor) 对话框。可用于可编辑人体模型。
•“编辑放置”(Edit Placement) - 打开“放置人体模型”(Place Manikin) 对话框。
•“显示”(Show) - 取消隐藏选定对象。
•“仅显示选定项”(Show Only) - 仅显示选定对象,并隐藏其他所有此类对象。
•“隐藏选定项”(Show All Except) - 隐藏选定对象,并显示其他所有此类对象。
•“缩放至选定项”(Zoom to Selected) - 放大至选定对象周围的边界框。
•“启用放置连接”(Enable Placement Connections) - 启用已禁用的放置连接。
•“禁用放置连接”(Disable Placement Connections) - 临时禁用放置连接。
•“重命名”(Rename) - 重命名人体模型。
•“重置姿势”(Reset Posture) - 将人体模型返回至默认姿势。
•“应用默认行为”(Apply Default Behavior) - 恢复默认放置约束。
•“清除所有约束”(Clear All Constraints) - 从人体模型中移除所有约束。
•“复制姿势和约束”(Copy Posture and Constraints) - 将源人体模型的姿势和约束复制到剪贴板。
•“粘贴姿势和约束”(Paste Posture and Constraints) - 将从源人体模型中复制的姿势和约束应用于目标人体模型。
单击约束以访问浮动工具栏命令,或右键单击以访问浮动工具栏和快捷菜单命令。
•“启用约束”(Enable Constraint) - 启用到达或查看约束。不可用于放置约束。
•“禁用约束”(Disable Constraint) - 禁用到达或查看约束。不可用于放置约束。
•“移除约束”(Remove Constraint) - 移除约束。
单击人体模型段组节点以访问浮动工具栏命令,或右键单击以访问浮动工具栏和快捷菜单命令。
•“锁定所有 DOF”(Lock All DOFs) - 锁定所有方向上的自由度。
•“解锁所有自由度”(Unlock All DOFs) - 解锁所有方向上的自由度。
•“重置姿势”(Reset Posture) - 将人体模型段组返回至默认姿势。
•“显示”(Show) - 取消隐藏选定对象。
•“仅显示选定项”(Show Only) - 仅显示选定对象,并隐藏其他所有此类对象。
•“隐藏选定项”(Show All Except) - 隐藏选定对象,并显示其他所有此类对象。
•“缩放至选定项”(Zoom to Selected) - 放大至选定对象周围的边界框。
单击人体模型段以访问浮动工具栏命令,或右键单击以访问浮动工具栏和快捷菜单命令。
• - 到达约束
•“显示”(Show) - 取消隐藏选定对象。
•“仅显示选定项”(Show Only) - 仅显示选定对象,并隐藏其他所有此类对象。
•“隐藏选定项”(Show All Except) - 隐藏选定对象,并显示其他所有此类对象。
•“缩放至选定项”(Zoom to Selected) - 放大至选定对象周围的边界框。
•“固定段”(Fix Segment)
- 固定人体模型段。
•“取消固定段”(Unfix Segment)
- 取消固定人体模型段。
•“重置姿势”(Reset Posture) - 将人体模型段返回至默认姿势。
•“锁定所有 DOF”(Lock All DOFs) - 锁定所有方向上的自由度。
•“解锁所有自由度”(Unlock All DOFs) - 解锁所有方向上的自由度。
•“锁定自由度 X”(Lock DOF X) - 锁定绕 x 轴的旋转,并在锁定全部链接段时锁定所有运动。
•“锁定自由度 Y”(Lock DOF Y) - 锁定绕 y 轴的旋转,并在锁定全部链接段时锁定所有运动。
•“锁定自由度 Z”(Lock DOF Z) - 锁定绕 z 轴的旋转,并在锁定全部链接段时锁定所有运动。
右键单击拖动器可访问快捷菜单命令。
•“固定段”(Fix Segment)
- 固定人体模型段。
•“取消固定段”(Unfix Segment)
- 取消固定人体模型段。
•“重置姿势”(Reset Posture) - 将人体模型段返回至默认姿势。
•“锁定所有 DOF”(Lock All DOFs) - 锁定所有方向上的自由度。
•“解锁所有自由度”(Unlock All DOFs) - 解锁所有方向上的自由度。
•“锁定自由度 X”(Lock DOF X) - 锁定绕 x 轴的旋转,并在锁定全部链接段时锁定所有运动。
•“锁定自由度 Y”(Lock DOF Y) - 锁定绕 y 轴的旋转,并在锁定全部链接段时锁定所有运动。
•“锁定自由度 Z”(Lock DOF Z) - 锁定绕 z 轴的旋转,并在锁定全部链接段时锁定所有运动。
•“重定向”(Reorient) - 将 3D 拖动器定向至选定参考。
•“重定向至屏幕”(Reorient to screen) - 定向 3D 拖动器使其与计算机屏幕平行。
•“重置方向”(Reset orientation) - 将 3D 拖动器重置回原始方向。
选择多个人体模型段后,右键单击图形窗口以访问快捷菜单命令。
•“固定段”(Fix Segment)
- 固定人体模型段。
•“取消固定段”(Unfix Segment)
- 取消固定人体模型段。
•“重置姿势”(Reset Posture) - 将人体模型段返回至默认姿势。
•“锁定所有 DOF”(Lock All DOFs) - 锁定所有方向上的自由度。
•“解锁所有自由度”(Unlock All DOFs) - 解锁所有方向上的自由度。
右键单击图形窗口中的空零件可访问快捷菜单命令。
•“创建快照”(Create Snapshot) - 创建快照。
关于约束:
使用约束定义人体模型移动,定义方法与所有装配类似。当某个段处于完全或部分锁定状态时,该段还会被锁定至其他段,以便这两个段能够同时移动。
单击 “到达”(Reach) 或 “查看”(Look At) 后,会在场景内的人体模型和几何间自动创建约束。可以捕获这些约束并将其保存在快照中以用于分析。
在人体模型树中,默认的放置约束、到达约束、查看约束和固定约束位于 “人体模型约束”(Manikin Constraints) 节点中。
在人体模型树中,当人体模型段或人体模型段组的 DOF (自由度) 为完全或部分锁定 (受约束) 状态时,这些图标会反映其状态:
•当人体模型段处于锁定状态时, 人体模型段图标会变为 , 处于部分锁定状态时会变为 。
•当人体模型段处于锁定状态时, 人体模型段组图标会变为 , 处于部分锁定状态时会变为 。
有关约束的详细信息,请搜索“帮助中心”的“装配”功能区域。
关于默认约束行为:
当将 manikin_drag_auto_locks 配置选项设置为 yes 时,默认放置约束会应用于人体模型。
根据上下文的不同,当“人体模型”(Manikin) 选项卡处于打开状态时,下列固定约束将出现在人体模型树中的 “人体模型约束”(Manikin Constraints) 下:
•左前足人体模型段已固定
•右前足人体模型段已固定
•骨盆 (骶骨) 人体模型段已固定,躯干人体模型段组中的其他人体模型段已锁定。
◦当人体模型为顶层装配下的子装配时,骨盆会出现在 “人体模型约束”(Manikin Constraints) 文件夹中。
◦当人体模型在单独的窗口中作为顶层装配打开时,骨盆人体模型段不会出现在 “人体模型约束”(Manikin Constraints) 文件夹中。
将人体模型插入装配后,会自动将两个放置连接添加至人体模型结构,一个对应右前足,另一个应对骶骨 (臀部)。要在“模型”(Model) 选项卡处于打开状态时查看装配中的默认连接,请右键单击人体模型占位符,然后从快捷菜单中选择“编辑定义”(Edit Definition)。
放置完人体模型并选好姿势后,其中一个放置连接即被激活。如果选择“站立”(Standing),则激活右前足连接,如果选择“就坐”(Sitting),则激活骶骨连接。当您选择“放置于”(Place on) 参考时,会在参考和站立人体模型的右前足(或就坐人体模型的骶骨)之间创建一个放置约束。
放置连接定义了模型中人体模型的初始位置和方向。因此,某些人体模型运动可能会受到限制。例如,人体模型右前足连接至放置平面且无法提升。可通过右键单击人体模型树的人体模型节点并选择 “禁用放置连接”(Disable Placement Connections) 来临时禁用连接。稍后可通过选择 “启用放置连接”(Enable Placement Connections) 来启用放置连接。
人体模型的躯干会受到约束,以便其始终是刚性的,更易于操作。要移动骨架,必须从“人体模型树”中选择一个骨架段并解锁该骨架。然后,可添加更多的特定约束 (如锁定特定的椎骨) 以防止旋转 (DOF Z 约束)。
人体模型的臀和脚尖被锁定。如果选择一条腿,脚尖将固定在地面上。然后,可以通过拖动人体模型的脚尖来更改其足的位置。拖动脚尖和臀时,它们的约束会暂时关闭。
当选择另一节段进行拖动时,第一个节段的默认约束会重新打开。如果将臀上下拖动,脚尖会仍然保持在地面上。要使人体模型处于蹲姿,请拖动臀。
PS:要完全禁用放置约束,请右键单击,然后从快捷菜单中选择“禁用所有约束”(Disable all constraints)。
关于 DOF (自由度):
DOF (自由度) 可约束人体模型段的移动范围,原理同约束人体移动范围类似。并非所有人体模型段均拥有绝对的 DOF。
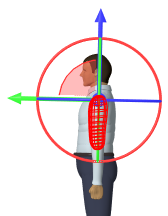
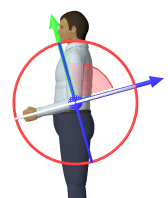
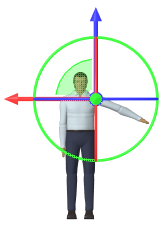
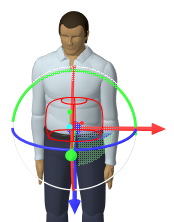
•DOF X - 控制弯曲,通过拖动器上的红色弧段控制
通常会使活动人体模型段靠近邻近的 (近身体中心或关节的) 相邻人体模型段。旋转拖动器的红色弧段可使远端人体模型段绕红色拖动器控制滑块旋转。
在 DOF X 范围内移动人体模型段的示例如下:
◦上臂
视频:
◦前臂
视频:
◦腰部
视频:
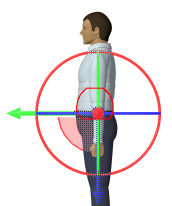
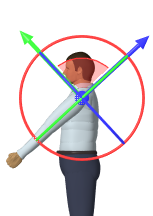
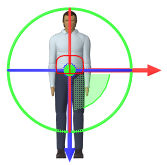
•DOF Y - 控制横向弯曲,通过拖动器上的绿色弧段控制
通常会将移动段从划分人体模型左右侧的平面上移开。旋转拖动器的绿色弧段可使远端人体模型段绕绿色拖动器控制滑块旋转。
在 DOF Y 范围内移动人体模型段的示例如下:
◦上臂
视频:
◦腰部
视频:
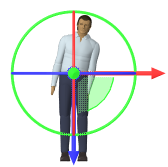
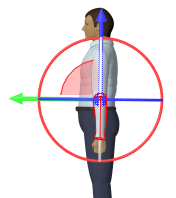
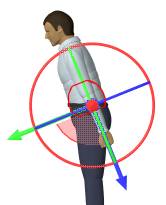
•DOF Z - 控制旋转,通过拖动器上的蓝色弧段控制
通常会使人体模型段绕其自身的邻近或远端轴旋转。
在 DOF Z 范围内移动人体模型段的示例如下:
◦上臂
视频中通过在 DOF Z 范围内旋转左上臂达到了扭转左臂的效果。运动链驱动手部移动的过程清晰可见:
◦腰部
视频中通过在 DOF Z 范围内旋转腰部达到了扭转躯干的效果:
关于固定人体模型段:
固定完人体模型段后,固定段会始终处于同一位置,并相对于放置人体模型时所依据的参考 (刚性主体) 保持静止状态。在尝试拖动固定段时,固定段会在拖动期间自动取消固定,拖动结束后会重新恢复固定状态。在拖动其他段时,固定段会保持固定状态,而非随之移动。
固定段对于其他段的影响
在拖动与固定段相邻的段时,该段会在达到相对于固定段的运动极限后停止。
固定段可防止其它段自由执行到达操作。例如,若固定左上臂,并希望人体模型的左手执行到达操作,那么由于运动链的限制,只有肘下方的左下臂可以执行到达操作。
可视指示
•在人体模型树中固定人体模型段后,其图标会从 更改为 。
•在 “人体模型约束”(Manikin Constraints) 节点中,固定段将显示为固定约束,且其前面还会带有 固定图标。
•在图形窗口中选择固定人体模型段后,将出现  固定标志符号。
固定标志符号。
应用姿势
将某一姿势应用于包含固定段的人体模型后,人体模型将以新的姿势重新定位,然后会自动重新应用固定约束。
替换人体模型
在一个人体模型替换另一个人体模型时,任何固定段都将在新的人体模型中保持固定状态。
固定与锁定交互
可固定包含完全或部分锁定 DOF (自由度) 的段。在固定完锁定或半锁定段后,该段的 DOF 锁定状态将被移除。
无法锁定固定段的 DOF。必须先取消固定段,然后才能锁定其 DOF。
选择多个段
可一次固定单个或多个人体模型段。在人体模型树中,“固定段”(Fix Segment) 命令在所有选定段均处于未固定状态时可用,“取消固定段”(Unfix Segment) 命令在所有选定段均处于固定状态时可用。
固定或取消固定人体模型段:
可固定和取消固定人体模型树或图形窗口中的人体模型段。
要固定人体模型段
执行下列操作之一:
•人体模型树:
a.在人体模型树中,选择一个或多个人体模型段。
b.从快捷菜单中右键单击并选择 “固定段”(Fix Segment)。
•图形窗口:
a.请确保将选择过滤器设置为“人体模型对象”(Manikin Objects)。
b.在图形窗口中,选择一个人体模型段。随即将显示 3D 拖动器。
c.右键单击所选段,然后从快捷菜单中选择 “固定段”(Fix Segment)。
固定人体模型段后,将出现三个可视标志:
•在人体模型树中的人体模型段组下,人体模型段图标将从 更改为 。
•在人体模型树中的 “人体模型约束”(Manikin Constraints) 下,会显示前面带有 固定图标的已固定段。
•在图形窗口中选择了固定段后,会出现 固定标志符号,并同显示于人体模型段上的 3D 拖动器产生一定的偏移。
要取消固定人体模型段
执行下列操作之一:
•人体模型树:
a.在人体模型树中,选择一个或多个已固定人体模型段。
b.从快捷菜单中右键单击并选择 “取消固定段”(Unfix Segment)。
•图形窗口:
a.请确保将选择过滤器设置为“人体模型对象”(Manikin Objects)。
b.在图形窗口中,选择已固定人体模型段。随即将出现 固定标志符号,并同 3D 拖动器产生一定的偏移。
c.执行下列操作之一:
▪快捷菜单:
右键单击固定段,然后选择 “取消固定段”(Unfix Segment)。
▪标志符号:
▪将鼠标指向 固定标志符号,直至将其激活并更改为  。
。
▪右键单击 标志符号,然后从快捷菜单中选择 “取消固定段”(Unfix Segment)。
取消固定人体模型段后:
•在人体模型树中的人体模型段组下,人体模型段图标将从 更改为 。
•人体模型树中的 “人体模型约束”(Manikin Constraints) 下将不再显示该段。
•在图形窗口中选择未固定的段后,不会出现 固定标志符号。
复制和粘贴人体模型姿势和约束:
可从一个人体模型中复制姿势和约束,然后将其应用于同一装配中的其它人体模型。
1.使用以下任一方式选择欲从中复制姿势和约束的源人体模型:
◦在人体模型树中选择 人体模型节点。
◦在图形窗口中,选择整个人体模型。
2.右键单击源人体模型,然后从快捷菜单中选择 “复制姿势和约束”(Copy Posture and Constraints)。随即会将姿势和约束复制到剪贴板。
3.在人体模型树中选择并右键单击一个或多个目标 人体模型节点,或在图形窗口中选择并右键单击一个或多个目标人体模型,然后选择 “粘贴姿势和约束”(Paste Posture and Constraints)。粘贴操作共分两步:
◦首先,将源人体模型的姿势应用于目标人体模型。
◦其次,将源人体模型的约束应用于目标人体模型。目标人体模型中 DOF (自由度) 的锁定或解锁状态将与源人体模型中的 DOF 保持一致。
4.如果新复制的约束在目标人体模型中不起作用,则装配可能会失败。可删除、禁用或重新定义存在问题的约束。
将人体模型放入场景:
1.打开其中放置有人体模型的已保存设计装配。
2.单击“人体模型”(Manikin) > “插入人体模型”(Insert Manikin)。显示人体模型库的“打开”(Open) 对话框和“放置人体模型”(Place Manikin) 对话框随即打开。
PS:有关设置库路径的信息,请参阅“相关链接”。
3.在“打开”(Open) 对话框中,从列表中选择一个人体模型并单击“打开”(Open)。
4.在“放置人体模型”(Place Manikin) 对话框中,选择或清除“使用占位符”(Use placeholder) 复选框。
PS:默认情况下,人体模型会自动组装到占位符装配中,然后再插入设计场景。尽管这被认为是好的做法,但您也可以清除占位符复选框,以插入没有占位符装配的人体模型。
5.键入人体模型的名称或接受默认名称。
6.要设置人体模型的姿势,请选择“站立”(Standing) 或“就坐”(Sitting) 复选框。
7.要选择供人体模型站立或就坐用的曲面,请单击“放置于”(Place On) 收集器并选择弯曲曲面或平整曲面。单击  以将方向反转 180°。
以将方向反转 180°。
8.要选择人体模型面向的方向,请单击“表面”(Facing) 收集器并选择曲面或基准平面。单击 以将方向反转 180°。
9.单击“确定”(OK)。
关于用一个人体模型替换另一个人体模型:
将人体模型放置在特定场景内并于上下文中对其进行评估后,可使用“替换”(Replace) 命令通过其它人体模型来验证同一场景。替换时,也可以执行下列操作:
•自动保留人体模型的当前姿势并将其应用于新人体模型。
•重复使用人体模型上的标记以优化重新连接过程。
•保存某个人体模型的所有现有快照和约束 (包括逆运动学行为) 并将其应用于另一个人体模型。
•调整人体模型的姿势以符合现有任务约束。
•通过更新结果保持现有分析
要用一个人体模型替换另一个人体模型:
1.从“模型树”或图形窗口中,选择要替换的人体模型。
2.右键单击,然后选取快捷菜单中的 “替换”(Replace)。“替换”(Replace) 对话框打开。
3.在“替换为”(Replace By) 下,单击“互换”(Interchange)。
4.浏览至人体模型库并选择替换的人体模型。
5.单击“确定”(OK)。人体模型将被替换。
PS:
•如果将 manikin_replace_keep_posture 配置选项设置为 yes,则新的人体模型会呈现相同的姿势,并且保持与所替换的人体模型相同的内部行为。
•如果人体模型过小可能无法达到针对原始人体模型设置的目标。这时可能需要向新的人体模型添加更大的弹性。
关于更改放置设置:
可以更改人体模型的放置、位置和方向设置。在“模型树”或图形窗口中选择一个人体模型,然后单击“人体模型”(Manikin) > “编辑放置”(Edit Placement)。
•将人体模型姿势切换为就坐或站立。
•在平面或非平面曲面上选择一个位置作为默认放置曲面。
•将人体模型方向设置为某特定平面。
编辑人体模型的放置:
1.从“模型树”或图形窗口中选择要编辑放置的人体模型。
2.单击“人体模型”(Manikin) > “编辑放置”(Edit Placement)。“放置人体模型”(Place Manikin) 对话框随即打开。
3.根据需要更改任何放置设置
a.要设置人体模型的姿势,请选择“站立”(Standing) 或“就坐”(Sitting) 复选框。
b.要选择供人体模型站立或就坐用的曲面,请单击“放置于”(Place On) 收集器并选择弯曲曲面或平整曲面。单击 以将方向反转 180°。
c.要选择人体模型面向的方向,请单击“表面”(Facing) 收集器并选择曲面或基准平面。单击 以将方向反转 180°。
4.单击“确定”(OK)。
在平面上移动人体模型:
在放置平面上平移和旋转人体模型。
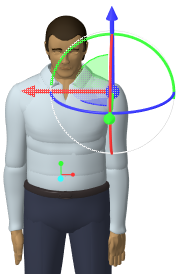
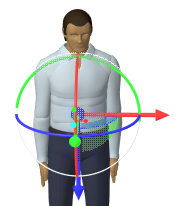
1.在人体模型树中,选择欲移动人体模型的 人体模型节点。人体模型上随即会显示 3D 拖动器。
◦如果站立放置连接处于活动状态,则拖动器将出现在右脚的站立平面上。
◦如果就坐放置连接处于活动状态,则拖动器将出现在臀部的就坐平面上。
2.通过以下任何一种方式在平面上移动人体模型:
◦通过拖动红色控制滑块沿 DOF X 前后平移人体模型。
视频:
◦通过拖动绿色控制滑块沿 DOF Y 侧向平移人体模型。
◦通过拖动蓝色弧段绕 DOF Z 旋转人体模型。人体模型将改变朝向。
视频:
只要 3D 拖动器处于可见状态,即可在平面上移动人体模型。
3.要停止在平面上移动人体模型,请执行以下任意操作:
◦单击图形窗口中的任意位置。
◦选择人体模型上的其他任何对象。
◦选择其他任何命令。
关于编辑自定义人体模型尺寸:
PTC 提供了现成的人体模型库。人体模型代表着拥有不同国籍、尺寸百分位数和性别的群体。
您可能希望人体模型能够代表特定的群体,例如基于第三方的统计信息或特定的测量结果。因此,可作为自定义基础的可编辑人体模型应运而生。
如编辑自定义人体模型尺寸中所述,自定义可编辑人体模型的过程是通过更改其尺寸实现的。由此创建出的人体模型即可代表目标群体,免去了从头设计的烦恼。
人体模型编辑器对话框
单击“人体模型”(Manikin) 选项卡上的 “编辑人体模型”(Edit Manikin),打开“人体模型编辑器”(Manikin Editor) 对话框。该对话框包含两个选项卡:
•“尺寸”(Dimensions) - 列出可编辑的人体模型尺寸。
已编辑的尺寸将以粗体显示。高度尺寸为驱动尺寸。
当鼠标悬停在尺寸的标签或值框上时,工具提示会显示原始尺寸值、允许的取值范围以及所有驱动该尺寸或受该尺寸驱动的尺寸。
打开“人体模型编辑器”(Manikin Editor) 对话框后,可看到人体模型的两个图形表示:
◦阐明尺寸测量方式的人体模型表示显示在“人体模型编辑器”(Manikin Editor) 对话框中的尺寸旁。单击线性尺寸的值框后,会以箭头形式显示图像中的线性尺寸。单击围度的值框后,会以椭圆形式显示围度尺寸。
除此之外,图像还会显示可能受尺寸编辑影响的其他尺寸。正在编辑尺寸的箭头或椭圆为绿色,可能受影响尺寸的箭头或椭圆为蓝色。以下示例说明了在编辑某一尺寸时将如何影响其他尺寸。
▪在编辑任意身高比例尺寸时,无论编辑哪个尺寸都会影响其余两个尺寸。
▪编辑上身长度:
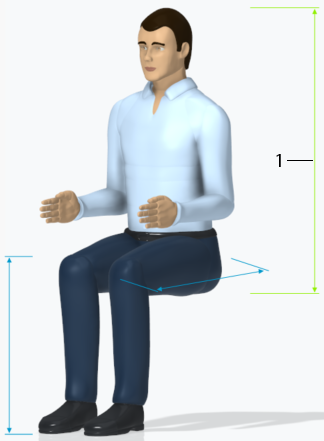
▪编辑大腿长度:
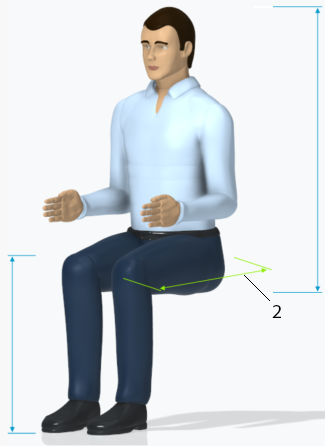
▪编辑小腿长度:
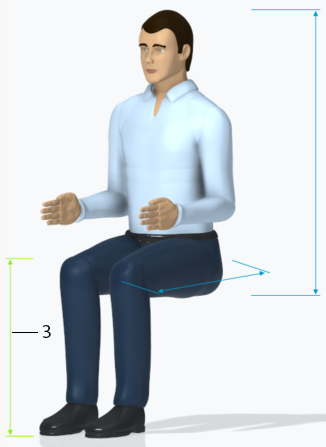
1.上身长度
2.大腿长度
3.小腿长度
▪在编辑胸围时,其他尺寸不受影响。在编辑肩宽时,胸围尺寸可能会受到影响。在编辑体重时,围度尺寸可能会受到影响。
▪编辑胸围:
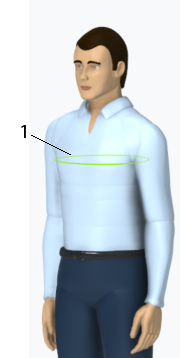
▪编辑肩宽:
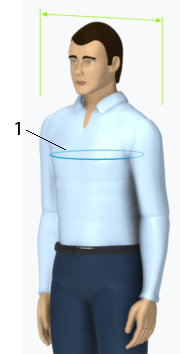
▪编辑体重:
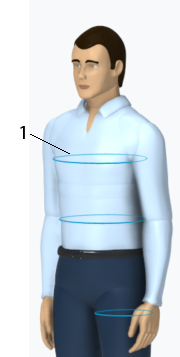
1.胸围
Creo 会尝试应用所输入尺寸的组合。每次修改后,所生成尺寸可能与最初的输入值有几毫米的出入。
◦“人体模型预览”(Manikin Preview) 窗口随即打开。每次更改尺寸后,此窗口中的人体模型表示均会更新,以便查看相关结果。
•“属性”(Attributes) - 列出人口统计、版本和说明信息等人体模型属性。可根据人体模型规范来编辑这些参数。
人体模型参数
在“参数”(Parameters) 对话框中,可设置过滤器以查看特定于可编辑人体模型的两个参数集中的任意一个:
•Editable manikin dimensions - 为每个可编辑尺寸显示一个包含两个参数的参数集:
◦USER_SET - 表明是否为参数设置了用户定义值。
◦DESIRED - 显示可编辑参数的用户定义值,若用户未定义参数,则显示默认值。
•Reported manikin dimension - 在人体模型中显示可编辑长度、宽度和围度尺寸的当前值。
编辑自定义人体模型尺寸:
1.打开自定义人体模型。
如果自定义人体模型位于装配上下文中,则必须在新窗口中打开该人体模型装配才能进行编辑。
目前,可供编辑的有以下人体模型:
◦m_custom.asm - 男性人体模型
◦w_custom.asm - 女性人体模型
◦通过编辑 m_custom.asm 或 w_custom.asm 自定义的人体模型
2.单击“人体模型”(Pieces) 选项卡。
3.单击 “编辑人体模型”(Edit Manikin)。“人体模型编辑器”(Manikin Editor) 对话框随即打开。
PS:由于某些尺寸会影响其他尺寸,因此尺寸输入的最佳顺序为从对话框顶部向底部输入。
4.要在“人体模型编辑器”(Manikin Editor) 对话框中设置用于人体模型尺寸的单位制,请在“要编辑的人体模型”(Manikin to edit) 下单击 旁的箭头,使其指向“单位”(Units),然后选择“公制”(Metric) 或“英制”(Imperial)。
5.要编辑高度尺寸,请在“高度”(Height) 旁键入某一高度值。
高度值将驱动其他人体模型尺寸值。如果已更改了任何其他尺寸,并编辑了高度,则高度尺寸将覆盖其他所有尺寸,且更改会在键入新高度尺寸后丢失。
高度的定义为从地板到头部 (顶点) 之间的距离,包括 1 英寸/2.5 cm 的鞋底。无法编辑鞋高。
6.要编辑体重尺寸,请在“体重”(Weight) 旁键入某一体重值。体重会驱动围度尺寸。
7.要编辑会对高度产生影响的尺寸,请在“身高比例”(Height Proportion) 下,键入以下三个尺寸中的一个或两个值:
◦“上身长度”(Upper body length)
◦“大腿长度 (坐姿)”(Upper leg length, seated)
◦“膝高 (坐姿)”(Lower leg length, seated)
如果自定义两个高度比例尺寸,则第三个尺寸不可用。
高度比例尺寸会彼此相互影响。即使在允许范围内将各个尺寸设置为该范围内的最大值和最小值,其也可能驱动允许范围外的受影响尺寸。
8.要编辑对高度无影响的长度或宽度尺寸,请在“长度和宽度”(Length and Width) 下键入下列任意值:
◦“臂长”(Arm length)
◦“肩宽”(Shoulder width)
▪如果编辑了肩宽,则即使体重发生更改,上臂围度仍会保持不变。
▪如果未编辑肩宽,则体重尺寸会同时驱动肩宽和上臂围度。
◦“手长”(Hand length)
◦“手宽”(Hand width)
◦“脚长”(Shoe length)
9.要编辑围度尺寸,请在“围度”(Circumference) 下键入下列任意值:
◦“胸围”(Chest)
◦“腰围”(Waist)
◦“大腿围”(Thigh)
更改围度尺寸只会更改主体几何。不会影响体重值。
10.欲添加文本以描述自定义人体模型所代表的群体,请单击“属性”(Attributes) 选项卡,然后键入人口统计、版本和说明信息:
◦“原始人体模型”(Original manikin) - 用于编辑人体模型的源人体模型。该选项不可编辑,将由系统自动填写。
◦“年龄组”(Age group) - 年龄范围。
◦“国家/地区”(Country) - 国家/地区或地理位置。
◦“数据库”(Data base) - 原始人体模型的拟人化数据库。
◦“性别”(Gender) - 男或女。
◦“尺寸百分位数”(Size percentile) - 人体模型所代表群体内的人体模型尺寸百分位数。最高的人体模型占 95%,最矮的占 5%。
◦“版本”(Version) - 人体模型的编号版本。
◦“设计者”(Modeled by) - 创建或编辑已编辑人体模型的人员或群组的名称。
◦“说明”(Description) - 其他用于描述群体的信息,例如职业等。
11.根据需要使用以下任意命令:
◦命令
▪“重置”(Reset) - 将人体模型的所有尺寸重置回上次存储人体模型时的尺寸。
▪“取消”(Cancel) - 取消对人体模型的更改。
◦快捷方式命令
右键单击人体模型尺寸,然后从快捷菜单中选择以下命令:
▪默认
- 针对已编辑尺寸,将尺寸恢复为由当前高度值驱动的值。不适用于高度。
12.要保存自定义人体模型,请单击以下命令之一:
◦“另存为”(Save As) - 将已编辑人体模型另存为新的自定义人体模型。可将已编辑人体模型保存至不同的位置。
◦“另存为”(Save As) > “保存”(Save) - 保存所做更改,覆盖先前的自定义人体模型。不能覆盖原始的可自定义人体模型。
关于操作和快照:
单击人体模型段或属于该段的任意几何或特征,以打开 3D 拖动器,借助该拖动器可将人体模型移至给定场景中的理想位置。可以保存该姿势并将其用于分析。拍摄快照可捕获与人体模型关联的所有现有锁定段和几何约束。
关于人体模型挠性:
必须先设置挠性,然后才可以执行操控或拖动操作。无法即时更改挠性设置。
manikin_flexibility 配置选项可设置模型在拖动时的挠性层级。将配置选项设置为 full (全部人体模型段均处于自由状态) 或 partial (锁定人体模型的手指段并将其视为一个整体) 时,人体模型会变得富有挠性。这种程度的挠性可确保完全且快速地应用选定姿势。
PS:当从姿势库中选择并应用姿势时,人体模型会暂时变得富有挠性。当应用姿势时,人体模型的挠性层级会恢复为其原始设置。
要创建快照:
快照可捕获应用于设计场景的所有约束,而非仅仅捕获那些与人体模型相关联的约束。
•在 人体模型树中右键单击 “快照”(Snapshots),然后从快捷菜单中选择“新建快照”(New Snapshot)。快照出现在“快照”(Snapshots) 文件夹中。
可随时重新应用、重命名、重新连接快照并更新人体模型场景,然后运行分析。
关于姿势:
人在执行实际任务时是以特定姿势站立或就坐的。要模拟这些姿势,可以创建并保存姿势,也可以从姿势库中导入一个姿势并对其进行编辑。随着时间的推移,您可以创建和保存多种人体模型主体位置,以执行与其设计相关的特定任务。
插入人体模型后,对人体模型进行操作直到其符合正常执行任务时所处的位置或姿势时为止。修改姿势或将姿势库中的某个姿势应用于人体模型时,可将其另存为快照以便将来在分析中使用。还可以操作人体模型的姿势并将该姿势保存到姿势库中,以供重复使用。
可通过姿势库中的任意一种姿势使人体模型的体位尽可能接近所需姿势,然后使用 3D 拖动器调整各个人体模型段以完善细节。
调整人体模型姿势:
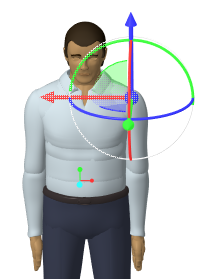
1.在图形窗口或模型树中,选择人体模型段或属于该段的任何几何或特征。随即将出现一个与该段轴线对齐的 3D 拖动器。
锁定任意轴的 DOF (自由度) 后,对应于该轴的弧段将灰显。锁定的轴不会更改颜色。
2.要使人体模型的体位与其正在执行的作业相适应,请使用 3D 拖动器执行以下任意操作
|
操作
|
结果
|
|---|---|
|
SHIFT + 拖动中心点
 |
在平行于屏幕平面的两个维度上平移人体模型段。该段作为一个整体进行移动并保持其方向。
|
|
拖动中心点
|
在平行于屏幕平面的两个维度上平移人体模型段。该段作为一个点进行移动但不保持其方向。
|
|
拖动控制滑块
 |
沿选定段的其中一个轴平移人体模型段。
|
|
拖动某一弧段
 |
绕运动轴旋转段。
|
|
在 3D 拖动器的弧段内拖动平面
 |
在平行于拖动器平面的两个维度上平移段。
|
右键单击 3D 拖动器,然后使用快捷命令启用沿附加轴的移动:
•“重定向”(Reorient) - 将 3D 拖动器定向至选定参考。
•“重定向至屏幕”(Reorient to screen) - 定向 3D 拖动器使其与计算机屏幕平行。
•“重置方向”(Reset orientation) - 将 3D 拖动器重置回原始方向。
将姿势应用于人体模型:
1.在“模型树”中,选择要应用姿势的人体模型。
2.单击“人体模型”(Manikin) > “应用姿势”(Apply Posture)。“姿势库”(Posture Library) 随即打开。
3.从库中选择一个姿势。
要向姿势库中添加姿势:
使用姿势库将预定义的姿势应用于设计中的人体模型,并保存已创建的姿势。
1.单击“人体模型”(Manikin) > “保存姿势”(Save Posture)。
2.选择要添加到姿势库中的人体模型或人体模型段。
3.单击“确定”(OK)。这将自动创建姿势的缩略图。
复制和粘贴人体模型姿势和约束:
可从一个人体模型中复制姿势和约束,然后将其应用于同一装配中的其它人体模型。
1.使用以下任一方式选择欲从中复制姿势和约束的源人体模型:
◦在人体模型树中选择 人体模型节点。
◦在图形窗口中,选择整个人体模型。
2.右键单击源人体模型,然后从快捷菜单中选择 “复制姿势和约束”(Copy Posture and Constraints)。随即会将姿势和约束复制到剪贴板。
3.在人体模型树中选择并右键单击一个或多个目标 人体模型节点,或在图形窗口中选择并右键单击一个或多个目标人体模型,然后选择 “粘贴姿势和约束”(Paste Posture and Constraints)。粘贴操作共分两步:
◦首先,将源人体模型的姿势应用于目标人体模型。
◦其次,将源人体模型的约束应用于目标人体模型。目标人体模型中 DOF (自由度) 的锁定或解锁状态将与源人体模型中的 DOF 保持一致。
4.如果新复制的约束在目标人体模型中不起作用,则装配可能会失败。可删除、禁用或重新定义存在问题的约束。
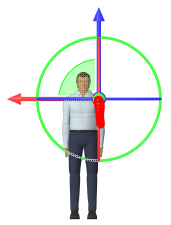
关于舒适角度分析:
舒适角度分析有助于确定区域的设计方法或对象的放置位置,以便于用户在场景中执行特定任务时轻松使用。
舒适角度分析会将人体模型的姿势与人体模型舒适角度 (mca) 文件进行比较。这些文件包含向人体中每个关节分配分数的数据。
mca 文件保存在“舒适度库”中。可以使用 ptc_manikin_comforts_path 配置选项设置“舒适度库”的默认位置。
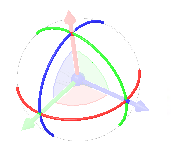
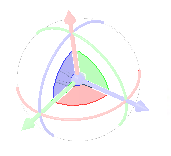
舒适角度分析的结果以分数形式显示在“舒适度分析”(Comfort Analysis) 对话框中,并以扇形区的形式显示在图形窗口中。针对分析的每个关节创建扇形区。可将这些结果另存为舒适度分析工具内的已保存分析或“模型树”中的已保存分析特征。
要执行舒适角度分析:
1.为 ptc_manikin_comforts_path 配置选项中的 Creo Manikin 舒适角度设置默认目录。
2.将人体模型插入活动场景后,单击“人体模型”(Manikin) > “舒适角度分析”(Comfort Angle Analysis)。“舒适度分析”(Comfort Analysis) 对话框随即打开。
3.单击“人体模型”(Manikin) 收集器,然后选择一个人体模型。如果场景中只有一个人体模型,则系统将自动选中该人体模型。
4.要选择与人体姿势进行比较的人体模型舒适角度 (mca) 文件,请单击“舒适度文件”(Comfort file) 收集器旁边的箭头,然后选择一个 mca 文件。
5.要选择可显示舒适角度分析的主体零件,请选中在“可见性”(Visibility) 下主体零件旁边的复选框。
6.单击“计算”(Compute)。结果以舒适度分数的形式显示在“结果”(Results) 区域中,并以扇形区的形式显示在图形窗口中,其中每个扇形区对应一个分析的关节。
7.查看结果。
8.保存分析或将其作为特征添加到“模型树”中。
要编辑人体模型舒适角度 (mca) 文件:
PS:.mca 文件和 Creo Manikin 用户界面采用了不同的 DOF (自由度) 术语:
MCA 文件
人体模型用户界面
拖动器上的颜色
|
MCA 文件
|
人体模型用户界面
|
拖动器上的颜色
|
|---|---|---|
|
DOF 1
|
DOF X
|
红色
|
|
DOF 2
|
DOF Y
|
绿色
|
|
DOF 3
|
DOF Z
|
蓝色
|
1.使用文本编辑器打开 mca 文件。
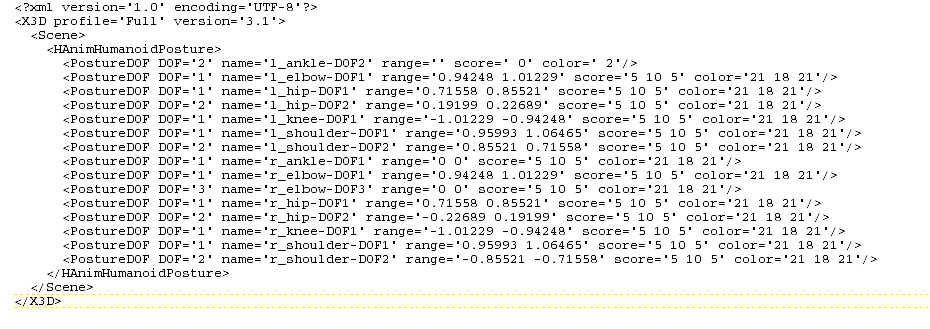
2.要添加段,请在 HAnimHumanoidPosture 部分的文本行后插入指针,按 ENTER 键新创建一行,然后键入新的文本行。
3.要移除某个段,请删除该段所在的文本行。
4.请针对每个段定义以下信息:
a.要定义段的移动约束,请键入以下文本:
▪键入 PostureDOF DOF='1' 以定义弯曲
▪键入 PostureDOF DOF='2' 以定义侧弯曲
▪键入 PostureDOF DOF='3' 以定义旋转
每个段中可包含一个、两个或三个移动约束,但是每个约束必须都位于单独的文本行中。
b.要选择段,请键入 name=,然后键入“人体模型树”中所显示段的名称。
c.要将 DOF 的运动范围拆分为多个角度区域,请键入 range=,然后为两个区域之间的每条边界键入一个值。根据需要,分别为介于第一个区域和第二个区域、第二个区域和第三个区域 (直到最后一个区域和它之前的一个区域) 之间的边界键入一个值。
无需键入 DOF 的上限与下限。应用程序将自动从 DOF 下限的第一个区域开始,并结束于 DOF 上限的最后一个区域。角度区域的数量要比为每个 DOF 定义的范围值的数量多一个。
以弧度为单位键入所有值。

d.要定义与每个舒适角度区域关联的分数,请键入 score=,然后为每个区域键入一个值。
分数值为介于 1 和 10 之间的数字,其中 1 表示不舒适,而 10 表示舒适。尺寸不与分数关联。一个分数值对应一个角度区域。
e.要为显示中使用的每个角度范围定义颜色,请键入 color=,然后为每个范围键入一个颜色值。一个颜色值对应一个角度区域。
人体模型舒适度角度 (MCA) 文件说明:
表格列出了 Creo Manikin 随带的 .mca 文件。这些文件中包含的首选角度旨在用作起点。这将给出基本人体模型技能指示。
如果要比较不同舒适度评估程序,可参阅所提供的参考。
舒适度文件
此表格列出了可用舒适度文件、文件分析内容说明及其资料来源。
|
文件名
|
说明和资料来源
|
|---|---|
|
LOS_sitting_dreyfuss.mca
|
就坐时的视线
基于人体尺寸表
|
|
LOS_standing_dreyfuss.mca
|
站立时的视线
基于人体尺寸表
|
|
SAE_850484.mca
|
汽车驾驶员舒适度
资料来源:SAE Technical Paper 850484,1985 年 2 月 1 日
|
|
car_wisner_rebiffe.mca
|
汽车驾驶员舒适度
资料来源:A. Wisner, R. Rebiffe, “Remarques sur la dispersion des mesures anthrométriques et l unicité du matériel produit en série”, Le Travail Humain, 36, 129-139, 1963
|
|
car_wisner_rebiffe_2.mca
|
汽车驾驶员舒适度
资料来源:A. Wisner, R. Rebiffe, “Remarques sur la dispersion des mesures anthrométriques et l unicité du matériel produit en série”, Le Travail Humain, 36, 129-139, 1963
|
|
cruising_bike_HS_2.mca
|
休闲自行车骑手的舒适度
基于人体尺寸表
|
|
cruising_bike_juv_HS.mca
|
休闲自行车骑手的舒适度,六岁儿童
基于人体尺寸表
|
|
operating_vehicle_HS.mca
|
汽车驾驶员舒适度
基于人体尺寸表
|
|
race_bike_HS.mca
|
竞速自行车骑手的舒适度
基于人体尺寸表
|
|
typewriting.mca
|
打字员舒适度
基于人体尺寸表
|
|
zero_gravity.mca
|
宇航员在太空中的舒适度
基于 NASA STD-3000 https://standards.nasa.gov/standard/nasa/nasa-std-3001-vol-1
|
手形工具强度文件:
本表格列出了手形工具强度文件及其说明。文件保存在“舒适度库”的 Force 文件夹内。
文件可分析人体模型在就坐姿势下、采用不同肘部角度垂直抓握时可发出的最大力量。针对平均力量 (50th %)、较小力量 (5th %) 和较大力量 (90th %) 提供了一个文件。返回的舒适度评分以磅力 (lb-f) 表示。
此文件基于 Hunsicker, P. A. “Arm Strength at Selected Degrees of Elbow Flexion”, Technical Report 54-548, Wright Air Development Center, Wright-Patterson Air Force Base, Ohio, August 1955。
|
文件名
|
说明
|
|---|---|
|
hand_force_down_50th.mca
hand_force_down_5th.mca
hand_force_down_90th.mca
|
向下推动
|
|
hand_force_left_50th.mca
hand_force_left_5th.mca
hand_force_left_90th.mca
|
向左推动
|
|
hand_force_pull_50th.mca
hand_force_pull_5th.mca
hand_force_pull_90th.mca
|
朝向自身拉动
|
|
hand_force_push_50th.mca
hand_force_push_5th.mca
hand_force_push_90th.mca
|
从自身向外推动
|
|
hand_force_right_50th
hand_force_right_5th
hand_force_right_90th
|
向右推动
|
|
hand_force_up_50th.mca
hand_force_up_5th.mca
hand_force_up_90th.mca
|
向上推动
|
关于定义舒适角度分析显示中的颜色:
在 mca 文件中定义舒适角度分析显示中的颜色。在文件中定义每个角度区域的颜色。
选取有意义的颜色。例如,可为具有最佳舒适度分数的范围定义绿色、为具有中等舒适度分数的范围定义黄色,并为具有不舒适分数的范围定义红色。
通过键入 color= 并为该段中的每个区域键入一个颜色码值来定义颜色。以下颜色码值可用于舒适角度分析显示:
|
颜色码值
|
颜色
|
名称
|
|---|---|---|
|
23
|
 |
褐色
|
|
19
|
 |
红色
|
|
21
|
 |
黄色
|
|
18
|
 |
绿色
|
|
9
|
 |
青色
|
|
5
|
 |
蓝色
|
|
8
|
 |
洋红色
|
|
0
|
 |
白色
|
|
4
|
 |
灰色
|
|
1
|
 |
黑色
|
保存人体模型分析:
可以将分析另存为分析工具 (用于创建分析) 中显示的已保存分析或“模型树”中显示的分析特征。
1.执行分析。
2.在相关的分析对话框中单击“已保存分析”(Saved Analyses),以展开对话框部分。
3.执行下列操作以创建已保存的分析或分析特征:
◦已保存分析
a.在“名称”(Name) 框中,为要保存的分析键入一个名称。
b.单击 。分析将显示在“已保存分析”(Saved Analyses) 列表中。保存模型时将保存分析,当打开同一个对话框时,分析将显示在列表中。
◦分析特征
a.单击“添加特征”(Add feature)。一个方框将在图形窗口中打开。
b.在“输入名称”(Enter Name) 下方,为特征键入一个名称。
c.单击确定 。已保存的分析特征将显示在“模型树”中。
4.单击“关闭”(Close)。
要检索已保存分析:
可采用以下任一种方式来检索分析:
•已保存分析
a.在“人体模型”(Manikin) 选项卡中的“人机工程学分析”(Ergonomic Analysis) 或“任务分析”(Task Analysis) 组中单击用于创建已保存分析的同一命令。相关分析对话框随即打开。
b.单击“已保存分析”(Saved Analyses) 展开对话框部分。
c.从“已保存分析”(Saved Analysis) 列表中选择要检索的分析,然后单击“检索”(Retrieve)。
•特征
a.在  模型树工具栏中,单击 “树过滤器”(Tree Filters)。“树过滤器”(Tree Filters) 对话框随即打开。
模型树工具栏中,单击 “树过滤器”(Tree Filters)。“树过滤器”(Tree Filters) 对话框随即打开。
b.在“常规”(General) 选项卡上,选中 “特征”(Features) 复选框,然后单击“确定”(OK)。
c.在“模型树”中,右键单击要检索的分析并选取 “编辑定义”(Edit Definition)。