机构动力学工作流:
如需详细信息,请选择左侧栏中的链接。
|
|
•定义刚性主体。
•分配质量属性。
•生成连接。
•定义运动轴设置。
•生成特殊连接。
|
|
|
|
•拖动装配。
|
|
|
|
•应用伺服电动机。
•应用弹簧。
•应用阻尼器。
•应用执行电动机。
•定义力载荷和扭矩载荷。
•定义重力。
|
|
|
|
•定义初始条件。
•创建测量。
|
|
|
|
•运行运动分析。
•运行动态分析。
•运行一个静态分析。
•运行力平衡分析。
•运行位置分析。
|
|
|
|
•回放结果。
•检查干涉。
•查看定义的测量和动态测量。
•创建轨迹曲线和运动包络。
•创建一个待转移至 Creo Simulate 的载荷集。
|
机构动力学中准备分析:
以下为在 Mechanism Dynamics 中运行分析前应检查的事项。
•交互式拖动 - 可以通过拖动模型来检查运动,并观察任意接头、凸轮从动机构连接或齿轮副连接所允许的运动。Mechanism Dynamics 中的建模图元,如弹簧、阻尼器、执行电动机、力和力矩载荷以及重力等,将不会影响拖动操作。
•定义初始条件 - 单击  可定义点、主体和运动轴的初始速度。使用初始条件可为图元指定速度(分析开始时刻的速度)。通过参考快照可定义机构中主体的初始位置。使用“拖动”(Drag) 对话框可为模型中的主体指定位置(分析开始时刻的位置)。
可定义点、主体和运动轴的初始速度。使用初始条件可为图元指定速度(分析开始时刻的速度)。通过参考快照可定义机构中主体的初始位置。使用“拖动”(Drag) 对话框可为模型中的主体指定位置(分析开始时刻的位置)。
•连接装配 - 运行装配分析,用定义的公差设置连接机构。无法连接装配时,既可以以更高的公差重新运行装配分析又可以重新定义连接。
•创建测量 - 如果要使用“最大”(Maximum)、“最小”(Minimum)、“整数”(Integral)、“平均”(Average)、“均方根”(Root mean square) 或“定时”(At Time) 这些计算方法来获得测量,则必须在运行分析前创建测量。
关于初始条件:
初始条件为执行动态分析时设置的位置和速度选项。只有具有 Mechanism Dynamics 许可证才可进行初始条件定义。
在“初始条件定义”(Initial Condition Definition) 对话框的“速度条件”(Velocity Conditions) 下单击相关按钮来指定以下初始条件:
•位置初始条件 - 确保分析从特定的位置开始。默认情况下,每次分析都从作为当前屏幕位置 (即在屏幕上看到的刚性主体的当前方向) 而显示的机构开始。可使用初始条件为每个分析建立一个一致的起始配置。
软件使用快照来参考初始位置。快照将捕获现有锁定刚性主体的形态和几何约束以定义位置约束。
•速度初始条件 - 以特定的速度开始分析。可以定义点、运动轴、角度及切向槽速度设置。
例如,如果要对汽车进行建模,用户可能希望在分析开始时,分析它以 65 mph 的速度运动的情况。速度初始条件的另一个示例是一扇门关闭的主体角速度(以度/秒表示)。
定义初始条件前,可能希望查看一些关于如何有效使用初始条件的提示。
回放初始条件
如果需要创建多个分析定义来调查具有不同配置的机构运动,可以使用前一分析的回放作为初始条件。在回放中捕获的速度和位置将成为下一分析的初始条件。由此可以创建分析链,其中每个分析可以具有不同的约束、连接、电动机、弹簧、阻尼器等。
关于初始条件定义对话框:
单击 时,“初始条件定义”(Initial Condition Definition) 对话框随即打开。使用框中的工具定义或编辑初始条件:
•“快照”(Snapshot) - 快照将在装配中为初始条件定义所有刚性主体的位置。
◦“当前屏幕”(Current Screen) (默认) - 在分析运行开始时,拍下屏幕上刚性主体方向的快照。
◦如果已定义了快照,则可从列表中选择快照。
•“速度”(Velocity) - 使用相应选项定义需要的速度初始条件类型以及选择参考图元:
◦单击  定义点或顶点处的线性速度。选择一个点或顶点作为参考图元,并定义矢量的模(以“长度/秒”为量纲)和方向。
定义点或顶点处的线性速度。选择一个点或顶点作为参考图元,并定义矢量的模(以“长度/秒”为量纲)和方向。
◦单击  定义运动轴的旋转或平移速度。选择运动轴作为参考分析并输入模(单位为长度/秒或度/秒)。
定义运动轴的旋转或平移速度。选择运动轴作为参考分析并输入模(单位为长度/秒或度/秒)。
◦单击  定义刚性主体沿已定义矢量的角位移。选择一个刚性主体作为参考图元。输入矢量的大小(单位为度/秒)和方向。
定义刚性主体沿已定义矢量的角位移。选择一个刚性主体作为参考图元。输入矢量的大小(单位为度/秒)和方向。
◦单击  定义从动机构点相对于槽曲线的初始切向速度。选择一个槽从动机构连接作为参考图元并输入模(单位为长度/秒)。使用“反向”(Flip) 使矢量指向正确方向。
定义从动机构点相对于槽曲线的初始切向速度。选择一个槽从动机构连接作为参考图元并输入模(单位为长度/秒)。使用“反向”(Flip) 使矢量指向正确方向。
速度图标区域显示两个附加按钮:
◦单击  计算具有速度条件的模型。
计算具有速度条件的模型。
◦单击  删除突出显示显示的条件。
删除突出显示显示的条件。
利用速度初始条件左侧的复选框可启用或禁用该条件。
选择参考图元后,对话框展开,显示“大小”(Magnitude) 和“方向”(Direction) 区域。使用以下各选项来定义矢量:
◦“大小”(Magnitude) - 键入速度矢量的大小。
◦“方向”(Direction) - 选取速度矢量的方向。
创建初始条件:
1.单击 。“初始条件定义”(Initial Condition Definition) 对话框打开。
2.为初始条件键入一个新名称或使用默认名称。
3.接受“快照”(Snapshot) 区域中的“当前屏幕”(Current Screen) 默认值,或从列表中选取先前创建的快照。
4.定义速度:
◦对于点速度,单击 。
◦对于运动轴速度,单击 。
◦对于角速度,单击 。
◦对于切向槽速度,单击 。
5.用常规选择方法在模型中选择参考图元。根据选定的图标,选取一个点、运动轴、顶点、零件、或槽从动机构连接。如果有效,列表区域将显示速度类型。
6.指定速度矢量的“大小”(Magnitude)。
7.对于“点速度”(Point Velocity) 和“角速度”(Angular Velocity),请指定速度矢量的“方向”(Direction)。
8.在“速度条件”(Velocity conditions) 列表中选择或清除速度类型复选框。
9.单击 确定初始条件的兼容性和有效性。
10.单击“确定”(OK)。
编辑初始条件:
1.要编辑初始条件,请在“机构树”中右键单击该初始条件,然后从快捷菜单中选取编辑定义 。“初始条件定义”(Initial Condition Definition) 对话框打开。
2.在列表框中选择速度初始条件。刚性主体上相应的参考图元将被突出显示。
3.添加或移除速度初始条件,或更改以下项中的任意个:
◦快照 (Snapshot)
◦“大小”(Magnitude)
◦“方向”(Direction)
4.清除速度条件左侧的复选框可禁用条件。
5.单击“确定”(OK) 保存修改的初始条件规范。
6.要恢复为之前保存的初始条件定义,请单击“取消”(Cancel)。
关于不一致的初始条件:
在“初始条件定义”(Initial Condition Definition) 对话框中单击“确定”(OK) 后,将执行校验检查。系统可以单独进行也可作为一个组来搜索以下各项内容:重复的名称、最后选定的速度约束、正确的方向、矢量位置及速度约束等。
如果初始条件不一致,则系统将显示一条错误消息,指出速度约束不符合要求,且初始条件无效。
当初始条件出现下列情况时,可能会发生初始条件不一致的现象:
•与连接约束相冲突。
•与其它初始条件相冲突。
故障诊断方法包括:
•将初始条件放在运动轴而非刚性主体上 (对于非封装元件)。
•选择初始配置的快照后,一次应用一个速度初始条件并单击 检查冲突。
使用拖动对话框设置初始条件的运动轴位置:
1.单击“拖动元件”(Drag Components)。打开“拖动”(Drag) 对话框的“快照”(Snapshots) 选项卡。
2.单击“快照”(Snapshots) 旁的箭头以展开对话框。
3.在“快照”(Snapshots) 选项卡上,选取下列操作之一:
◦从列表中选择一个现有快照。
◦单击  创建当前屏幕配置的快照。
创建当前屏幕配置的快照。
◦将刚性主体拖动至所需配置,然后单击 。
4.单击附加选项的“高级拖动选项”(dvanced Drag Options) 旁的箭头以移动元件。
5.单击“约束”(Constraints) 选项卡。
6.单击  并选择一个运动轴。“状况”(Status) 列显示了已启用的条件。
并选择一个运动轴。“状况”(Status) 列显示了已启用的条件。
PS:单击 可将约束的“状况”(Status) 改为“禁用”(Disabled)。
7.要更改位置:
◦在“约束”(Constraints) 列表中选择并突出显示约束。
◦在“值”(Value) 框中选择并突出显示值,并输入一个正值或负值。
◦按下 ENTER 键。运动轴的位置变为与输入值对应的位置。
8.如果希望保存具有此运动轴约束的配置,单击 。将在“快照”(Snapshots) 选项卡上创建一个编号递增了的新快照。可修改或接受默认名称。
9.如果机构约束无法被满足,请单击“重做”(Redo) 进行重试,或单击“继续”(Continue) 对未组装的机构进行更改。
关于终止条件:
终止条件为包含限制或定义移动的变量、常数、运算符和常用函数的表达式或数学方程。
如果一个分析定义了终止条件,条件将会在以下情况中停止分析:经过指定的时间后、指定的事件发生后或当条件满足时。步距长度会自动调整,使条件满足的同时即可终止分析。
要创建终止条件:
1.单击  。“终止条件定义”(Termination Condition Definition) 对话框打开。
。“终止条件定义”(Termination Condition Definition) 对话框打开。
2.输入条件的描述性名称或接受默认名称。
3.单击对话框中的运算符图标。对于每组可用的运算符,都将打开一个单独的窗口。单击任意图标来访问相关库以及定义一个表达式:
◦单击  可打开“运算符”(Operators) 对话框。
可打开“运算符”(Operators) 对话框。
◦单击  可打开“常量”(Constants) 对话框。
可打开“常量”(Constants) 对话框。
◦单击  可打开“函数”(Functions) 对话框。
可打开“函数”(Functions) 对话框。
◦单击  可打开“变量”(Variables) 对话框。
可打开“变量”(Variables) 对话框。
4.单击“确定”(OK) 并运行分析。当满足终止条件时停止分析。
示例:使用终止条件:
可以定义一个终止条件,当模型伺服电动机上的载荷过大时,将停止分析。
1.创建净负荷测量并将其命名为 servo_load。
2.定义终止条件并将其命名为 servo_crash,包括表达式 servo_load>1000。
3.定义动态分析并选择 servo_crash 作为终止条件。
4.运行分析。
创建终止条件的指导方针:
设置终止条件时,应切记以下指导方针:
•当应用于连续值时,等式运算符 (= =) 可以更为精确,但是不等式运算符 ( > 或 < ) 可以更为可靠并提供更好的性能。
•只能为 Mechanism Dynamics 分析设置终止条件。
•表达式不得超过 1023 个字符。
•表达式可以包含一个或多个变量。
•当应用于连续值时,等式运算符 (= =) 可以更为精确,但是不等式运算符 ( > 或 < ) 可以更为可靠并提供更好的性能。
•尽管可使用任何表达式,但使用外推至逻辑值 (例如,真/假) 的表达式不失为一个很好的主意。
指定零件的质量属性:
1.单击  打开“质量属性”(Mass Properties) 对话框。
打开“质量属性”(Mass Properties) 对话框。
2.从列表中选择“零件或顶层布局”(Part or Top-Level Layout)。
3.在模型上选择一个零件。
4.在“定义属性”(Define properties by) 列表中,选择以下方法之一:
◦默认
◦密度
◦“质量属性”(Mass properties)
5.要更改默认零件坐标系,请选择其他坐标系。
6.如果用密度定义质量属性,则按以下步骤进行:
a.键入一个“密度”(Density) 值。
b.在“惯量”(Inertia) 中,选择相对于当前坐标系或重心的惯性矩。
c.单击“应用”(Apply)。质量和惯性矩值都将被更新。
7.如果已从“定义属性”(Define properties by) 列表中选择了“质量属性”(Mass properties),则按以下步骤操作:
a.输入一个“质量”(Mass) 值。
b.输入“重心”(Center of Gravity) 的位置坐标。
c.选择“惯量”(Inertia) 类型并接受默认值或键入新值。
8.单击“应用”(Apply)。
9.单击“确定”(OK)。
指定装配的质量属性:
1.单击 打开“质量属性”(Mass Properties) 对话框。
2.从列表中选择“装配”(Assembly)。
3.在模型上选择一个装配。
4.在“定义属性”(Define properties by) 列表中,选择以下两种方法之一:
◦默认
◦密度
5.单击  并在模型上选择坐标系。
并在模型上选择坐标系。
6.如果要用密度定义质量属性,请在“密度”(Density) 字段中输入一个值。
7.单击“确定”(OK)。
关于 3D 接触用户界面:
“3D 接触”(3D Contact) 选项卡包含选项卡、命令和快捷菜单。3D 接触在“机构模型树”中用  表示。单击 “3D 接触”(3D Contact) 创建或编辑 3D 接触。
表示。单击 “3D 接触”(3D Contact) 创建或编辑 3D 接触。
命令
•“参考”(References) - 选择接触参考:
◦单击“接触 1”(Contact 1) 框,选择第一个接触的参考。
◦单击“接触 2”(Contact 2) 框,选择第二个接触的参考。
•“顶点半径”(Vertex Radius) - 选择顶点后,在框中输入半径值。
•在“摩擦”(Friction) 下,从列表中选择一个选项,以定义有摩擦或无摩擦的 3D 接触。定义有摩擦的 3D 接触时,为静摩擦系数 或动摩擦系数 键入一个值。
选项卡
•“参考”(References) (默认打开) - 显示选定接触参考,如果有一个接触参考是顶点,则还将显示顶点半径。默认的顶点半径为零件边界框尺寸的 2.5% 大小。
◦“完整几何”(Full Geom) - 指定将选定参考视为完整几何对象。
◦“接触参考 1”(Contact Reference 1) - 显示第一个接触的选定参考。单击  可反向接触曲面侧。
可反向接触曲面侧。
◦“接触参考 2”(Contact References 2) - 显示第二个接触的选定参考。单击 可反向接触曲面侧。
◦“顶点半径”(Vertex Radius) - 选择顶点后,在框中输入半径值。
•“接触”(Contact) - 用于显示“侧 1 接触属性”(Side 1 Contact Properties) 和“侧 2 接触属性”(Side 2 Contact Properties)。从列表中选择一个选项。
◦“选择材料”(Select material) - 单击“更多”(More) 以选择要使用的材料。
◦“使用值”(Use values) - 为“泊松比”(Poisson's ratio)、“杨氏模量”(Young's modulus) 和“阻尼”(Damping) 键入值。
•“属性”(Properties) - 显示 3D 接触的名称。单击  可在浏览器中打开特征信息。
可在浏览器中打开特征信息。
关于 3D 接触:
不同刚性主体中两个零件之间的连接叫做 3D 接触,在这种情况下,接触位于第一个刚性主体内的单个曲面或顶点与第二个刚性主体内的一或多个球形、圆柱或平面曲面或顶点之间。您可以在球面 - 球面、球面 - 平面 (或平面 - 球面)、圆柱 - 圆柱 (或平面 - 圆柱) 或圆柱 - 平面对之间定义 3D 接触,如下图所示。不过,您无法在平面 - 平面或球面 - 圆柱对之间定义 3D 接触。
当您选择顶点作为 3D 接触曲面时,会在该顶点周围显示一个球面。会像处理球面一样处理该顶点:
虽然 3D 接触并不是真正的连接,但它们具有许多与其它连接类型相似的属性。它们显示在“模型树”中的“连接”(Connections) 下,可在定义测量、快照和分析约束时将其用作连接。
可以使用 3D 接触测量定义压力角、接触面积和滑动速度属性。在运动学拖动期间,将启用 3D 接触零件之间的碰撞检测。3D 接触在“装配模型树”中还以特征形式显示。
单击鼠标右键,然后选取 编辑定义 以编辑“装配”中的 3D 接触。
要创建 3D 接触:
1.在打开机构装配后,单击 “3D 接触”(3D Contacts)。“3D 接触”(3D Contact) 选项卡随即打开。
2.在两个零件上选择接触参考。可选择球形曲面、柱形曲面、平面曲面或者顶点。
3.如果选择顶点,请在框中为“顶点半径”(Vertex Radius) 输入一个值。
4.单击“接触”(Contact) 以查看或修改接触属性。
5.从框中选择“使用值”(Use values) 或“选择材料”(Select material) 以为连接零件定义材料值:
◦“使用值”(Use values) - 接受默认值、键入新值或从列表中选取值,以更改“泊松比”(Poisson's ratio)、“杨氏模量”(Young's modulus) 或“阻尼”(Damping) 值。
◦“选择材料”(Select material):
a.单击“更多”(More)。“材料”(Materials) 对话框随即打开。
b.从列表中选择材料,然后双击以将其添加到“模型中的材料”(Materials in Model) 列表。
c.单击“确定”(OK)。选定的材料被添加到“接触”(Contact) 面板材料列表中。
d.在列表中选择材料。“泊松比”(Poisson's ratio)、“杨氏模量”(Young's modulus) 或“阻尼”(Damping) 值会进行更新。
PS:可为每个零件选择不同的材料。
6.从“摩擦”(Friction) 选项列表中选择“有摩擦”(With Friction),以创建有摩擦的 3D 接触。
7.键入静摩擦和动摩擦的值。
8.单击  预览新接触,然后单击确定关闭。
预览新接触,然后单击确定关闭。
关于力和扭矩:
如果有 Mechanism Dynamics 许可证,即可为机构创建外部的力和扭矩。
可以应用力或扭矩来模拟对机构运动的外部影响。力或扭矩通常表示机构与另一刚性主体的动态交互作用,并且是在机构的零件与机构外部图元接触时产生的。
力总表现为推力或拉力,它可导致对象更改其平移运动,例如,手指推盒子的力将使盒子根据推力的方向移动。扭矩是一种旋转力或扭曲力,如在盒子顶部施加的使其进行旋转的力。力和扭矩被视为电动机特征,它们与电动机的定义方式相同。
单击  访问“电动机”(Motor) 选项卡,然后创建或编辑力或扭矩。
访问“电动机”(Motor) 选项卡,然后创建或编辑力或扭矩。
要创建力或扭矩:
1.单击 “力/扭矩”(Force/Torque)。“电动机”(Motor) 选项卡随即打开。“驱动数量”(Driven Quantity) 设置为“力”(Force)。
2.选择参考,设置运动类型和方向。
3.设置力扭矩轮廓详细信息。
4.查看图形显示。
5.单击确定 。
选择参考
使用“参考”(References) 选项卡来选择参考、设置运动类型,并设置运动方向。
1.在模型上选择参考图元。要施加点力,选择一点或顶点。对于刚性主体扭矩,则选择刚性主体。对于点对点力,在不同的刚性主体上选择两个点或顶点。
2.“运动类型”(Motion Type) 由选定的“从动图元”(Driven Entity) 参考自动确定。一个点或点对点力表示平移运动。刚性主体扭矩始终表示旋转运动。
3.在“运动方向”(Motion Direction) 区域,指定力或扭矩矢量的方向。
a.从下列选项中选择运动方向的类型:
▪“显式矢量”(Explicit Vector) - 为矢量选择“参考系”(Reference Frame)。将此框留空以使用全局坐标系。输入显式 X、Y 和 Z 值。
▪“直线或平面法线”(Straight Line or Plane Normal) - 选择运动参考。单击“反向”(Flip) 以反转力或扭矩的方向。
▪“点对点”(Point-to-Point) - 选择两个点以指定方向。
b.从“方向相对于”(Direction Relative to) 区域中,选择“基础”(Ground) 或“从动刚性主体”(Driven Rigid Body)。
设置轮廓详细信息
定义力或扭矩时,“驱动数量”(Driven Quantity) 设置为“力”(Force)。请按照以下步骤来设置其他选项。将“主变量”(Primary Variable) 设置为 t (时间)。
1.要定义力或扭矩的类型,请从列表中选择“函数类型”(Function Type)。
|
函数类型
|
说明
|
系数
|
|---|---|---|
|
恒定
|
创建常数轮廓。
|
q = A
其中
A = 常数
|
|
线性
|
创建随时间呈线性变化的轮廓。
|
q = A + B*x
其中
A = 常数
B = 斜率
|
|
余弦
|
为电动机轮廓分配余弦波值。
|
q = A*cos(360*x/T + B) + C
其中
A = 幅值
B = 相位
C = 偏移量
T = 周期
|
|
摆线
|
模拟凸轮轮廓输出。
|
q = L*x /T – L*sin(360*x/T)/(2*pi)
其中
L = 总高度
T = 周期
|
|
抛物线
|
模拟电动机的轨迹。
|
q = A*x + 1/2 B(x2)
其中
A = 线性系数
B = 二次项系数
|
|
多项式
|
定义三次多项式电动机轮廓。
|
q = A + B*x + C*x2 + D*x3
其中
A = 常数项
B = 线性项系数
C = 二次项系数
D = 三次项系数
|
|
表
|
使用四列表格中的值生成电动机运动。可以使用输出测量结果表。
|
有关详细信息,请参阅定义表电动机函数。
|
|
用户定义
|
指定由多个表达式段定义的任何一种复杂轮廓。
|
有关详细信息,请参阅要定义用户定义电动机函数。
|
|
自定义载荷
|
向模型施加一系列外部定义的复合载荷。该选项仅用于执行电动机定义。
|
有关详细信息,请参阅自定义载荷。
|
2.设置所选类型电动机函数的系数。
设置图形显示
使用“图形”(Graph) 部分,在“图表工具”(Chart-Tool) 中显示力扭矩轮廓图。
1.默认情况下会选择“力”(Force) 图形轮廓,单击“导数”(Derivative) 复选框以将轮廓添加到图形。清除复选框以从图形中移除轮廓。
2.定义表轮廓时,可以修改与显示和插值点数有关的设置。
3.要在单独的窗口中显示每个图形,请单击以选中“在单独图形中”(In separate graphs) 复选框。
4.单击  打开“图表工具”(Chart-Tool) 窗口。
打开“图表工具”(Chart-Tool) 窗口。
更改属性
要更改力扭矩特征属性,请使用“属性”(Properties) 选项卡。
1.要编辑名称,请在“名称”(Name) 框中键入一个新名称。
2.要在浏览器中显示特征信息,请单击 。
要编辑力或扭矩:
1.从“模型树”或“机构树”中选择力或扭矩,然后单击鼠标右键并从快捷菜单中选取 编辑定义。“电动机”(Motor) 选项卡随即打开。力或扭矩在模型中突出显示。
2.使用命令、“参考”(References) 选项卡和“轮廓详细信息”(Profile Details) 选项卡来编辑力或扭矩的参数和值。
3.单击确定 。
关于重力:
使用“重力”(Gravity) 命令可模拟重力对装配运动的影响。如果有 Mechanism Dynamics 许可证,则可定义重力。
单击  访问“重力”(Gravity) 对话框,并为模型定义重力加速度矢量。该矢量可模拟重力,即将一个刚性主体拉向另一刚性主体的基本物理力。定义重力后,即会在整个顶层装配中应用单个统一的重力。装配中的刚性主体 (除基础主体外),将沿指定的重力加速度的方向移动。
访问“重力”(Gravity) 对话框,并为模型定义重力加速度矢量。该矢量可模拟重力,即将一个刚性主体拉向另一刚性主体的基本物理力。定义重力后,即会在整个顶层装配中应用单个统一的重力。装配中的刚性主体 (除基础主体外),将沿指定的重力加速度的方向移动。
重力一旦定义,模型中即会出现一个 WCS 图标和一个指示重力加速度方向的箭头。也可使用“重力”(Gravity) 对话框来编辑或移除重力。
进行动态、静态、或力平衡分析时,如果要使重力包括在计算过程中,请选择“分析定义”(Analysis Definition) 对话框中“外部载荷”(External loads) 选项卡下的“启用重力”(Enable gravity) 复选框。如果未选择此复选框,则在分析过程中将不应用重力。
关于重力对话框:
用“重力”(Gravity) 对话框可定义模型的重力加速度矢量。该对话框包含下列信息:
•“模”(Magnitude) - 以“距离/秒²”为量纲给重力加速度的模输入一个正值。距离单位取决于为装配所选的单位。
“模”(Magnitude) 的默认值是以装配的默认设置单位表示的引力常数 (如 386 in/second²)。
•“方向”(Direction) - 输入 X、Y 和 Z 座标来定义重力加速度和力的矢量。方向是相对于机构中顶层装配的默认坐标系定义的。
重力加速度的默认方向是“全局坐标系”(WCS) 的 Y 轴负方向,如方向矢量所示。
要定义或编辑重力:
1.在“机构树”中,单击 或右键单击重力定义并选取 编辑定义。“重力”(Gravity) 对话框打开。还出现表示重力加速度方向的 WCS 图标和箭头。
2.为重力加速度矢量的模键入一个正值,或者更改现有值。
3.输入或修改矢量坐标。
4.按下 ENTER 键。箭头的方向与方向矢量匹配。
5.单击“确定”(OK)。
PS:要在分析过程中对机构应用重力,必须在“分析定义”(Analysis Definition) 对话框的“外部载荷”(External loads) 选项卡中选择“启用重力”(Enable gravity) 复选框。
移除重力:
1.在“机构树”中,单击 或右键单击重力定义并选取编辑定义 。“重力”(Gravity) 对话框打开。还出现表示重力加速度方向的 WCS 图标和箭头。
2.为重力加速度矢量的模输入零。
3.单击“确定”(OK)。
关于弹簧:
弹簧在机构中生成平移或旋转弹力。弹簧被拉伸或压缩时产生线性弹力,在旋转时产生扭转力。这种力能使弹簧返回平衡位置,即,无任何外力影响的位置(松弛)。弹力的大小与距平衡位置的位移成正比。
可以沿着平移轴或在不同刚性主体上的两点间创建一个拉伸弹簧。可以沿着旋转轴创建一个扭转弹簧。
单击 “弹簧”(Springs) 以打开“弹簧”(Springs) 选项卡并创建一个弹簧。
在 Mechanism Design 中创建的弹簧是一种装配特征。它的值是有效参数。在“装配”和 Mechanism Design 中均可编辑弹簧。只有模型在 Mechanism Design 中打开,继承弹簧才会在装配模型树中出现。
关于弹簧用户界面:
“弹簧”(Spring) 用户界面由选项卡、命令和快捷菜单组成。弹簧系统在“机构树”中用  表示。单击 “弹簧”(Springs) 以编辑或创建弹簧。单击选项卡查看现有弹簧的属性。
表示。单击 “弹簧”(Springs) 以编辑或创建弹簧。单击选项卡查看现有弹簧的属性。
命令
•“弹簧类型”(Spring Type)
◦“延伸”(Extension) - 将弹簧类型设置为延伸或压缩。
◦“扭转”(Torsion) - 将弹簧类型设置为扭转。
•“参考”(References) - 收集弹簧参考。
•设置
◦“K 因子”(K factor) - 设置弹簧刚度系数。
◦当前 (Current) - 显示弹簧参考点与运动轴参考 (平移) 或角 (旋转运动轴) 之间的当前距离。单击 可将当前距离或角度分配为未拉伸值
◦“未拉伸”(Unstretched) - 设置弹簧的未拉伸长度。
PS:可以输入弹簧刚度系数值、弹簧长度系数值以及压缩度和角度,或从最近常用值的列表中选择。选定值将出现在相邻框中。
快捷菜单
在“机构树”或图形窗口中右键单击某个弹簧可访问下列附加的特征专用命令:
•“清除”(Clear) - 清除参考收集器。
•“延伸/压缩”(Extension/Compression) - 将弹簧类型设置为延伸或压缩。
•“扭转”(Torsion) - 将弹簧类型设置为扭转。
•“使用运动轴零点”(Use Motion Axis Zero) - 使用运动轴零点参考来计算弹簧力。
•“自定义”(Custom) - 设置自定义参考来计算弹簧力。
设置参考时,可以右键单击“参考”(References) 收集器访问这些命令:
•“移除”(Remove) - 删除选定参考。
•“全部移除”(Remove All) - 删除全部参考。
•“信息”(Information) - 打开选定参考的信息窗口。
如果为延伸弹簧选择参考,拖动控制滑块会出现在图形窗口中。使用第二个拖动控制滑块设置第二个参考,然后使用图标直径拖动控制滑块调整图标显示直径。
选项卡
•“参考”(References) - 显示弹簧放置参考。
•“选项”(Options) - 如果选择“调整图标直径”(Adjust Icon Diameter) 复选框,则显示延伸弹簧图标的直径。
•“属性”(Properties) - 显示弹簧名称。单击 可在浏览器中打开特征信息。
创建弹簧:
1.单击 “弹簧”(Springs)。“弹簧”(Spring) 选项卡随即打开。
2.对于延伸弹簧,单击 “延伸”(Extension);对于扭转弹簧,单击 “扭转”(Torsion)。
3.默认打开“参考”(References) 选项卡。选择运动轴或点以放置弹簧。按住 CTRL 选择两个基准点,或选择一个基准点,然后拖动控制柄到第二个基准点。
4.对于运动轴零基弹簧,选择“连接点”(Attachment Points) 下的“使用运动轴零点”(Use motion axis zero) 以将运动轴位置设置为零点,或选择“自定义”(Custom) 以设置自己的连接点。
5.单击“选项”(Options) 选项卡设置延伸弹簧的图标显示大小。选择“调整图标直径”(Adjust Icon Diameter) 复选框并在“直径”(Diameter) 框中输入一个值,或拖动控制柄设置直径。
6.对于弹簧刚度系数“K 因子”(K factor),可为其输入值或从列表中选择一个值。
7.对于未拉伸弹簧的长度,可在“未拉伸”(Unstretched) 框中输入或从列表中选择一个值。
PS:这些参数的单位由模板设置,不能被更改。
8.单击“属性”(Properties) 键入弹簧新名称。
9.单击预览新弹簧,或单击
10.单击确定 。
关于阻尼器:
阻尼器是一种载荷类型,可创建它用来模拟机构上真实的力。阻尼器产生的力会消耗运动机构的能量并阻碍其运动。例如,可使用阻尼器代表将液体推入柱腔的活塞减慢运动的粘性力。阻尼力始终和应用该阻尼器的图元的速度成比例,且与运动方向相反。
PS:必须有 Mechanism Dynamics 许可证才可创建阻尼器。
在 Mechanism Dynamics 中创建的阻尼器是一种装配特征。它的值是有效参数。在“装配”和 Mechanism Dynamics 中均可编辑阻尼器。只有模型在 Mechanism Dynamics 中打开,现有阻尼器才会在装配模型树中出现。
单击  访问“阻尼器”(Dampers) 选项卡并创建一个阻尼器。
访问“阻尼器”(Dampers) 选项卡并创建一个阻尼器。
关于阻尼器用户界面:
“阻尼器”(Damper) 选项卡用户界面由选项卡、命令和快捷菜单组成。阻尼器在“结构树”中用 表示。单击 “阻尼器”(Dampers) 以创建或编辑阻尼器。单击选项卡查看现有阻尼器的属性。
命令
•“移动类型”(Movement Type)
◦“平移”(Translation) - 将阻尼器类型设置为延伸或压缩。
◦“旋转”(Rotation) - 将阻尼器类型设置为扭转。
•“参考”(References) - 收集阻尼器参考。
•“阻尼系数”(Damping Coefficient)
◦C - 设置阻尼系数。从列表中选择单位。
PS:可以输入阻尼系数值或从最近使用值的列表中选择一个值。选定值将出现在相邻框中。
选项卡
•“参考”(References) (默认打开) - 显示阻尼器放置参考。
•“属性”(Properties) - 显示阻尼器名称。单击 可在浏览器中打开特征信息。
快捷菜单
在“机构树”或图形窗口中右键单击某个阻尼器可访问这些特征专用命令。
•“清除”(Clear) - 清除参考收集器。
•“延伸/压缩”(Extension/Compression) - 将阻尼器类型设置为延伸或压缩。
•“扭转”(Torsion) - 将阻尼器类型设置为扭转。
创建阻尼器:
1.单击 “阻尼器”(Dampers)。“阻尼器”(Dampers) 选项卡随即打开。
2.对于过渡阻尼器,单击 “平移”(Translation);对于旋转阻尼器,单击 “旋转”(Rotation)。
3.默认打开“参考”(References) 选项卡。选择运动轴或基准点定义阻尼器。按住 CTRL 选择两个基准点,或选择一个基准点,然后拖动控制柄到第二个基准点。
4.对于阻尼系数 C,可为其输入值或从最近使用的值列表中选择一个值。
5.单击“属性”(Properties) 键入阻尼器新名称。
6.单击 预览新阻尼器,或单击 查看阻尼器信息。
7.单击确定 。
编辑阻尼器:
1.从“机构树”中选择阻尼器,然后单击鼠标右键并从快捷菜单中选取编辑定义 。“阻尼器”(Damper) 选项卡随即打开,阻尼器图标在模型中突出显示,相应的参考出现在收集器中。
2.单击选项卡以修改阻尼器的“参考类型”(Reference Type) 或“属性”(Properties)。
3.单击 更新模型并检查所做更改。
4.单击确定 。
在装配模型树中显示弹簧和阻尼器:
1.在模型树区域的顶部,单击  。“树过滤器”(Tree Filters) 对话框随即打开。
。“树过滤器”(Tree Filters) 对话框随即打开。
2.单击“机构”(Mechanism),然后在“模型树中的机构”(Mechanisms in Model Tree) 下选中“弹簧”(Springs) 和“阻尼器”(Dampers) 复选框。
3.单击“应用”(Apply) 继续选择其它要显示的特征,或单击“确定”(OK)。
关于衬套载荷:
可创建“衬套载荷”特征来模拟两个刚性主体之间的移动。尽管运动学研究 (含运动学拖动) 中会忽略衬套载荷,但它是动态研究 (动态分析、静态分析和力平衡分析) 中需要考虑的一个因子。如果对衬套载荷应用焊缝连接,则可以锁定运动轴并将弹簧刚度和阻尼力或扭矩应用到六个自由度中的每个自由度。这相当于将无穷大的弹簧刚度应用到轴,从而有效移除相应的自由度。
通常假设两个刚性主体间的衬套直接传递运动。但是,研究动态模型行为时,最佳方法是假设其间带有衬套的两个刚性主体单独移动。“衬套载荷”特征模拟各刚性主体间的运动。在动态分析中使用衬套载荷时,可将弹簧和阻尼器应用至参考连接的每个轴,并根据需要调整弹簧刚度和阻尼系数。
建模时可检查此行为。在“焊缝”连接或 6DOF 连接上创建衬套载荷,然后设置每个运动轴的弹簧刚度和阻尼系数 (对每根未拉伸长度的弹簧,该值为零)。
如果在焊缝连接上创建衬套载荷,则可通过将弹簧刚度设为无穷大值并在定义对话框中键入“Locked”来锁定任意运动轴 (自由度)。锁定运动轴时确保直接传递运动。系数值作为有效参数存储在特征定义中,其命名如下:
当 AXIS_NAME 为 TR1、TR2、TR3、ROT1、ROT2 及 ROT3 字符串之一时,名称为 <AXIS_NAME>_STIFFNESS 或 <AXIS_NAME>_DAMPING_COEFFICIENT (平移轴 1、2、3 和旋转轴 1、2、3)。
要创建衬套载荷:
按照以下步骤来创建衬套载荷特征:
1.在打开机构装配后,单击 “衬套载荷”(Bushing Loads)。“衬套载荷”(Bushing Load) 选项卡随即打开。
2.选择焊缝或 6DOF 连接。
3.默认打开“系数”(Coefficients) 选项卡。请输入弹簧刚度和阻尼系数的值。
4.对于任何未拉伸的衬套弹簧,该值都为零;无论何时,只要焊缝连接的坐标系重合,弹簧力也就为零。
5.使用焊缝连接时可以锁定轴,在这种情况下,装配将失去其最后一个自由度。
6.单击“属性”(Properties) 选项卡,然后键入衬套载荷的新名称或单击
7.单击 来预览衬套载荷。
8.单击确定 接受衬套载荷定义。
运行分析:
可从“机构树”和“分析定义”(Analysis Definition) 对话框来运行分析。
1.从“机构树”中选择分析,单击鼠标右键并从快捷菜单中选择  ,或者单击 “机构分析”(Mechanism Analysis),然后从“分析定义”(Analysis Definition) 对话框中单击“运行”(Run)。
,或者单击 “机构分析”(Mechanism Analysis),然后从“分析定义”(Analysis Definition) 对话框中单击“运行”(Run)。
分析开始运行。底部栏上会显示运行进度。在动态分析中,图形窗口中会同时显示已用去的时间。
2.单击图形窗口底部栏上的 以提早停止分析。
提示:运行分析:
分析模型时,以下要点可能会有所帮助:
•如果机构未按所期望的那样运转,其原因可能是自由度过多或过少。使用分析定义的锁定图元部分添加或移除约束,可解决该问题。
•分析运行可另存和存储为一个结果集 (.pbk) 文件。单击 “回放”(Playback) 在同一会话中回放该结果集。
•如果分析运行显示在特定帧处无法组装该机构,则表明可能已经定义了要求机构在一个不可能实现的构造进行组装的电动机。这可能是因为定义电动机的方法有错误,多个电动机之间有冲突,或因为电动机试图将一个接头移过其极限。在最后组装成功的帧中检查机构,并确定电动机定义是否适当。
•运行分析后,可将机构制成动画来确保其按期望的方式运动,同时检查零件之间的干涉情况。还可创建关键值(包括反作用力或运动轴位置、速度和加速度)的图形。
关于分析的锁定图元:
可选择“分析定义”(Analysis Definition) 对话框的“首选项”(Preferences) 选项卡上的其中一个选项执行下列操作:
•要锁定刚性主体,单击  并选取引导主体。然后选择所有要和引导主体锁定在一起的刚性主体。要将所有刚性主体锁定到基础主体,可在要求您拾取引导主体时单击鼠标中键。两个锁定的刚性主体将被添加至“锁定的图元”(Locked Entities) 列表。
并选取引导主体。然后选择所有要和引导主体锁定在一起的刚性主体。要将所有刚性主体锁定到基础主体,可在要求您拾取引导主体时单击鼠标中键。两个锁定的刚性主体将被添加至“锁定的图元”(Locked Entities) 列表。
要使刚性主体彼此相对固定,可使用刚性主体锁定约束。创建时,标签左侧的复选框被默认选择。如果不希望将此项包括到当前分析中,请清除该项。
•要锁定连接,请单击 并选取要锁定的连接。要使某个连接在分析期间保持其当前配置,可使用该约束。
PS:凸轮和槽的连接也可锁定。不能选择齿轮副连接进行锁定:必须选择齿轮副中的一个接头连接。锁定的连接将添加到“锁定的图元”(Locked Entities) 列表中。
创建时,标签左侧的复选框被默认选择。如果清除该复选框,则在当前分析中将不包括锁定的连接。
•要禁用连接,单击 并选取要禁用的连接。
•运行力平衡分析时,请使用测力计锁定约束。要定义测力计锁定,请单击  并选取某一点或顶点、应用测力计的刚性主体外加一个方向矢量。按照先前选定的刚性主体坐标系,指定方向矢量分量。
并选取某一点或顶点、应用测力计的刚性主体外加一个方向矢量。按照先前选定的刚性主体坐标系,指定方向矢量分量。
•要删除一个或多个图元,突出显示一行或多行并单击 ,从列表中移除单个或多个图元。
指定用于分析的电动机:
对于此过程,您必须位于“分析定义”(Analysis Definition) 对话框的“电动机”(Motors) 选项卡中。
1.要包括电动机,可从下列选项中选取:
◦选择一个电动机,然后单击  添加另一实例。
添加另一实例。
◦单击  ,添加所有可用的电动机。
,添加所有可用的电动机。
PS:选择一行或更多行,然后单击  移除不需要的更改
移除不需要的更改
2.如果要更改外部载荷处于活动状态的时间,请从列表中选择一个载荷,然后单击“自”(From) 或“至”(To) 下面的区域,对时间进行编辑。
3.单击“确定”(OK) 或“运行”(Run)。
指定用于分析的外部载荷:
对于此过程,您必须位于“分析定义”(Analysis Definition) 对话框的“外部载荷”(External loads) 选项卡中。定义分析时存在于模型中的所有载荷都会在该选项卡中列出。
1.要包括外部载荷,可从下列选项中选取:
◦选择现有载荷并单击 ,添加另一载荷实例。
◦单击 为模型添加所有可用的载荷。
PS:选择一行或更多行,然后单击 移除不需要的载荷。
2.如果要更改外部载荷处于活动状态的时间,请从列表中选择一个载荷,然后单击“自”(From) 或“至”(To) 下面的区域,对时间进行编辑。
3.单击列表中任一载荷的名称。如果希望使用多个外部载荷实例,请选择其它载荷,实例在分析中的不同时间处于活动状态。
4.选中或清除“启用重力”(Enable gravity) 复选框。有关应用重力的其他信息,请单击下面的“关于重力相关链接”。
5.选中或清除“启用所有摩擦”(Enable all friction) 复选框。
6.单击“运行”(Run) 来运行新分析,或单击“确定”(OK) 接受分析定义并稍后运行。
输入外部载荷信息:
使用“外部载荷”(External loads) 选项卡可为动态、静态和力平衡分析类型指定外部载荷信息。不能为位置和运动分析设置外部载荷。
默认情况下,在定义分析时模型中的所有外部载荷都被包含在分析中。要包括在完成分析定义后创建的外部载荷,单击 ,以明确地将其包括在内。
如果单击列表中任一载荷的名称,可选择另一载荷。如果实例在分析中的不同时间处于活动状态,可使用此方法选取外部载荷的多个实例。
输入外部载荷信息时,切记以下几点:
•“自”(From) 和“至”(To) 时间
◦默认情况下,从分析的“开始”(Start) 到“终止”(End),所有外力都处于活动状态。
◦对于动态分析,可从列表中选择“开始”(Start) 和“终止”(End) 时间,或指定一个数值。
◦对于静态分析和力平衡分析,则不能应用“开始”(Start) 和“终止”(End) 时间。
◦由“确定”(OK) 或“运行”(Run) 命令激活的验证检查,会将所有不正确的值都重新设置为“开始”(Start) 或“终止”(End) 时间值。
•默认情况下,“启用重力”(Enable gravity) 复选框未被选择。如果未选择该复选框,则重力为零。
•默认情况下,“启用所有摩擦”(Enable all friction) 复选框处于未选择状态。如果未选择该复选框,则不应用摩擦。
输入电动机信息:
使用“分析定义”(Analysis Definition) 对话框中的“电动机”(Motors) 选项卡,可在各种分析类型的分析定义中添加、删除或选择要使用的电动机。对于每种类型的分析,“电动机”(Motors) 选项卡的使用方式稍有不同。
所有分析:
•默认情况下,会包括在创建分析时模型中存在的所有电动机。要明确地将完成分析定义后创建的电动机包括在内,可编辑分析定义,然后单击 。
•在“电动机”(Motors) 选项卡上,单击 以将先前定义的电动机包括到分析中。默认情况下,此电动机为列表中的第一台电机。选择 时,会将模型中各个电动机的一个实例包括到分析中。
•“自”(From) 和“至”(To) 时间的默认值为分析时域的“起始”(Start) 和“终止”(End) 时间。
•单击“电动机”(Motors) 选项卡上的列标题,可按字母顺序排序电动机,或按数字顺序排序“自”(From) 和“至”(To) 时间。
运动学和位置分析:
•对于运动和位置分析,可控制伺服电动机的起始和终止时间。可启动、关闭一个电动机,并在分析运行期间内启动另一电动机。这在创建分析时就更具有灵活性。通过编辑“电动机”(Motors) 选项卡中的“自”(From) 和“至”(To) 时域,可控制伺服电动机。
•在运动分析中不能使用几何伺服电动机。对于运动分析,这些电动机不会出现在可用的伺服电动机列表中。
•可为“自”(From) 输入一个数值,或在“自”(From) 列中的列表中选取“起始”(Start),它表示分析的起始时间。“至”(To) 列也是一个带有“终止”(End) 选项的导入框,它表示分析的终止时间。
•如果为时间指定了无效值,软件会根据情况适当地将其设置为分析的“起始”(Start) 或“终止”(End) 时间。
动态、静态和力平衡分析:
•对于动态、静态和力平衡分析,既可使用伺服电动机,也可使用执行电动机。在这些分析期间,伺服电动机均处于活动状态。伺服电动机的“自”(From) 和“至”(To) 时间是不可编辑的。
•对于动态分析、静态分析或力平衡分析,驱动点或平面的几何伺服电动机将不会出现在可用电动机列表中。它们对这些分析没有影响。
•所有电动机在整个静态分析和力平衡分析期间都保持活动状态。
由于可为一个图元定义多个电动机,所以要随时留意所包括或所排除的电动机。为避免分析失败和结果不准确,对于一个图元每次只激活一个电动机。例如,如果在同一旋转运动轴上创建一个零位置伺服电动机和一个非零常数速度伺服电动机,对于同一分析则不要同时激活这两个电动机。另外,如果在同一运动轴上定义两个执行电动机,并在同一动态分析中将它们都激活,则所形成的作用力将为两个电动机的总和。
关于动态分析:
动态分析是力学的一个分支,主要研究力及其与刚性主体运动的关系,有时也研究力与平衡的关系。使用动态分析可研究作用于刚性主体上的力、刚性主体质量与刚性主体运动之间的关系。
运行动态分析时应切记以下要点:
•基于运动轴的伺服电动机在动态分析期间都处于活动状态。因此,从分析时域导出的“自”(From) 和“至”(To) 将显示为不可编辑的“开始”(Start) 和“终止”(End) 值。
•可添加伺服电动机和执行电动机。
•如果伺服电动机 (或称执行电动机) 具有不连续轮廓,则在运行动态分析之前,系统会尝试使其轮廓连续。如果不能使其轮廓连续,则电动机将不能用于分析。
•可使用“外部载荷”(External loads) 选项卡添加力或扭矩。
•可考虑或忽略重力和摩擦力。
在开始动态分析时,通过指定持续时间为零并照常运行,可计算位置、速度、加速度和反作用力。系统会自动确定用于计算的合适的时间间隔。如果用图形表示分析的测量结果,则图形将只包含一条线。
单击 “机构分析”(Mechanism Analysis),打开“分析定义”(Analysis Definition) 对话框,并创建、编辑和运行分析。
机构分析中的自适应时间步进
时间步进是指使用数值时间步长积分在时域中对动态模拟进行驱动的方式。自适应是指积分中所使用的步长大小不固定。每个时间步长经调整后均满足积分步长的估计局部截断误差小于精度这一条件。其他事件 (如达到极限等) 也会缩短步长。Mechanism Dynamics 引擎所使用的精度等同于相对公差与特征长度的乘积。可在“模型属性”(Model Properties) 对话框的“机构”(Mechanism) 行中设置相对公差和特征长度。
在“分析定义”(Analysis Definition) 对话框中设置“最小间隔”(Minimum Interval) 时,将设置最大时间步长。分析中使用的积分步长值可能要小得多。时间步长值由精度确定。
应用程序引擎采用 3 阶龙格库塔积分器进行动态分析。可以使用 mdo_integration_method 配置选项值来设置积分方法。
•auto (默认) - 系统会根据需要在隐式积分与显式积分之间自动切换。
•implicite - 系统仅使用隐式积分。建议在阻尼系数较大时使用。
•explicite - 系统仅使用显式积分。建议在接触或接头限制较多,且阻尼和刚度不太大时使用。
创建动态分析:
1.单击 “机构分析”(Mechanism Analysis)。“分析定义”(Analysis Definition) 对话框打开。
2.键入标签的名称或接受默认名称。
3.在“类型”(Type) 下,选择“动态”(Dynamic)。
4.在“首选项”(Preferences)选项卡、“电动机”(Motors) 选项卡和“外部载荷”(External loads) 选项卡中键入值。
5.单击“运行”(Run) 来运行新分析,或单击“确定”(OK) 接受分析定义并稍后运行。
定义动态分析的首选项:
对于此项程序,必须在“分析定义”(Analysis Definition) 对话框的“首选项”(Preferences) 选项卡上,在“类型”(Type) 下选择了“动态”(Dynamic)。
1.在“图形显示”(Graphical display) 下,选择下列之一:
◦“长度和帧频”(Length and rate)
◦“长度和帧数”(Length and frame count)
◦“帧频和帧数”(Rate and frame count)
2.在“持续时间”(Duration)、“帧数”(Frame count)、“帧频”(Frame rate) 和“最小间隔”(Minimum interval) 字段中输入相关信息。
3.在“锁定的图元”(Locked entities) 区域中,选择下列选项之一:
◦单击 并将某一刚性主体选为引导主体,然后选择一组要锁定到该引导主体的从动主体。在分析过程中,从动主体相对于引导主体保持固定。
◦单击 并选择要锁定的连接。连接的允许移动在分析时被锁定。
◦单击 并选择要禁用的连接。
锁定或禁用连接的名称显示在“锁定的图元”(Locked entities) 列表中。
PS:单击 ,从列表中删除不想要的锁定/禁用约束。
4.要设置模型的起始条件,在“初始配置”(Initial configuration) 下选择下列选项之一:
a.单击“当前”(Current) 使用当前屏幕配置。
b.单击“初始条件状态”(I.C.State) (或“快照”(Snapshot)),并选取先前保存的初始条件或快照。
5.如果选择“初始条件状态”(I.C.State),则单击 以预览与该状态关联的配置。
输入动态分析的首选项:
使用“分析定义”(Analysis Definition) 对话框中的“首选项”(Preferences) 选项卡,可指定动态分析的时域、锁定的图元和初始配置信息。
不能指定动态分析的开始时间。伺服电动机、弹簧、阻尼器和齿轮副在整个动态分析期间都处于活动状态。必须从打开上述图元的时刻开始分析,以便考虑这些图元所产生的影响。
从“图形显示”(Graphical display) 下的列表中选择其中一个选项。用于指定时域的参数取决于所选的项。按下面的说明输入数值以指定分析的时域:
•“长度和帧频”(Length and rate) - 输入“持续时间”(Duration) 和“帧频”(Frame rate) 或“最小间隔”(Minimum Interval) 以定义分析时域。
PS:如果要在动态分析开始时计算机构中图元的位置、速度、加速度和反作用力,则在“持续时间”(Duration) 中输入 0。用此方法,可在运行一个较长的动态分析之前进行快速检查。
•“长度和帧数”(Length and frame count) - 输入“持续时间”(Duration) 和“帧数”(Frame count) 以定义分析时域。
•“帧频和帧数”(Rate and frame count) - 输入“帧数”(Frame count) 和“帧频”(Frame rate) 或“最小间隔”(Minimum interval) 以定义分析时域。
PS:“帧频”(Frame rate) 与“最小间隔”(Minimum interval) 彼此互为补充。下列公式表示了运动运行的长度、帧数、帧频和间隔的关系:
Frame Rate = 1/Interval
Frame Count = Frame Rate * Length + 1
使用“锁定的图元”(Locked entities) 区域可指定在动态分析期间机构中保持锁定的刚性主体或连接。锁定刚性主体在定义的分析期间将使某个刚性主体相对于另一刚性主体位置保持固定。锁定连接在定义的分析期间将移除和连接的 DOF 关联的运动。禁用的连接将被临时隐含并在分析时不予考虑。
使用“初始配置”(Initial configuration) 区域可选择动态分析开始时的配置和速度条件。选择下列选项之一:
•单击“当前”(Current) 使用刚性主体在当前屏幕配置中的位置。
•单击“初始条件状态”(I.C.State) 选择先前保存的初始条件。也可预览和选定的初始条件关联的配置。
定义后,可以立刻进行分析。单击“运行”(Run) 时,将检查分析中是否存在错误,检查方式与单击“确定”(OK) 时相同。对已定义的分析只是运行而并不添加到模型中。单击“确定”(OK) 后,软件会完成定义,创建分析并将分析定义添加到模型中。
关于力平衡分析:
力平衡分析是一种逆向的静态分析。在力平衡分析中,是从具体的静态形态获得所施加的作用力,而在静态分析中,是向机构施加力来获得静态形态。
使用力平衡分析可求出要使机构在特定形态中保持固定所需要的力。
在运行力平衡分析前,必须将机构自由度降至零。使用连接锁定、两个刚性主体间的刚性主体锁定、某点的测力计锁定或者将活动的伺服电动机应用于运动轴。使用“分析定义”(Analysis Definition) 对话框中的项计算机构的自由度,并对机构应用约束,直到获得零自由度为止。
单击 “机构分析”(Mechanism Analysis),打开“分析定义”(Analysis Definition) 对话框,并创建、编辑和运行分析。
创建力平衡分析:
1.单击 “机构分析”(Mechanism Analysis)。“分析定义”(Analysis Definition) 对话框打开。
2.键入标签的名称或接受默认名称。
3.在“类型”(Type) 下,选择“力平衡”(Force balance)。
4.在“首选项”(Preferences)选项卡、“电动机”(Motors) 选项卡和“外部载荷”(External loads) 选项卡中键入值。
5.单击“运行”(Run) 来运行新分析,或单击“确定”(OK) 接受分析定义并稍后运行。
定义力平衡分析的首选项:
对于此项程序,必须在“分析定义”(Analysis Definition) 对话框的“首选项”(Preferences) 选项卡上,在“类型”(Type) 下选择了“力平衡”(Force Balance)。力平衡分析必须满足以下条件:
•无测力计时,恰好有一个自由度。
•引入测力计后,自由度恰好为零。
1.单击  。随即显示自由度数。
。随即显示自由度数。
2.进行如下操作,将 DOF 减小到 0:
◦单击 并将某一刚性主体选为引导主体,然后选择一组要锁定的从动主体。在分析过程中,从动主体相对于引导主体保持固定。
◦单击 并选择一个连接。连接的允许移动在分析时被锁定。
◦单击 并选择要禁用的连接。
◦单击 创建测力计锁定。
3.锁定或禁用连接的名称显示在“锁定的图元”(Locked entities) 列表中。
PS:单击 ,从列表中删除不想要的锁定或禁用约束。
4.应用每一个约束后,按第 1 步中所述内容检查自由度,直到 DOF 为 0。
5.如果要使分析使用当前配置,则在“初始配置”(Initial configuration) 下单击“当前”(Current)。
6.如果想使用先前创建的初始条件的快照,则在“初始配置”(Initial Configuration) 下单击“快照”(Snapshot),并从列表中选择一个快照。
7.单击 查看配置。
要输入力平衡分析的首选项:
利用“分析定义”(Analysis Definition) 对话框中的“首选项”(Preferences) 选项卡可指定下列力的平衡分析信息:
•使用“锁定的图元”(Locked entities) 区域可指定力平衡分析的约束。可锁定刚性主体和连接、创建测力计锁定、禁用/启用连接或删除锁定的图元。锁定刚性主体在定义的分析期间将使某个刚性主体相对于另一刚性主体位置保持固定。锁定连接将移除和这些连接的自由度关联的运动。禁用的连接将被临时隐含并在分析时不予考虑。
在一个力平衡分析中,仅可以有一个测力计锁定处于活动状态。可定义多个测力计锁定,但只能激活列表中的一个锁定。创建测力计锁定或突出显示锁定图元列表中某个先前已定义的测力计锁定时,会在选定点处按指定的方向出现一个阴影箭头。要查看测力计的反作用结果,可创建测力计反作用测量。
•在运行力平衡分析前,单击 可计算机构的自由度 (DOF)。在运行分析前,必须应用刚性主体锁定、连接锁定或测力计锁定将 DOF 减为零。
•可为力平衡分析指定“初始配置”(Initial configuration)。该配置描述了机构中零件和刚性主体的相对方位。默认情况下,使用当前配置计算力平衡。可从可用快照的初始配置列表中使用“快照”(Snapshot)。选择在“拖动”(Drag) 对话框中保存的快照。只使用选定快照中机构刚性主体的位置。保存在快照中的所有约束均被忽略。
定义后,可以立刻进行分析。单击“运行”(Run) 时,将检查分析中是否存在错误,检查方式与单击“确定”(OK) 时相同。对已定义的分析只是运行而并不添加到模型中。单击“确定”(OK) 后,软件会完成定义,创建分析并将分析定义添加到模型中。
关于静态分析:
静态学是力学的一个分支,其研究对象是刚性主体在平衡状态下的受力情况。使用静态分析可确定机构在承受已知力时的状态。应用程序会搜索配置,其中机构中所有载荷和力处于平衡状态,并且势能为零。静态分析比动态分析能更快地识别出静态配置,因为静态分析在计算中不考虑速度。
虽然静态分析的结果是稳态配置,但还是应将这些结果与示例中的结果进行比较,以更好地理解所获得的结果。
运行静态分析时应切记以下要点:
•如不指定初始配置,单击“运行”(Run) 时,系统将从当前显示的模型位置开始静态分析。
•运行静态分析时,会出现加速度对迭代数的图形,显示机构图元的最大加速度。随着分析的进行,图形显示和模型显示都会变化以反映计算过程中到达的中间位置。当机构的最大加速度为 0 时,表明机构已达到稳态。
•通过更改“分析定义”(Analysis Definition) 对话框的“首选项”(Preferences) 选项卡内的“最大步距因子”(Maximum step factor),可以调整静态分析中各迭代之间的最大步长。减小此值会减小各迭代之间的位置变化,且在分析具有较大加速度的机构时会很有帮助。
•如果找不到机构的静态配置,则分析结束,机构停留在分析期间到达的最后配置中。
•计算出的任何测量尺寸都是最终时间和位置的尺寸,而不是处理进程的时间历程的尺寸。
单击 “机构分析”(Mechanism Analysis),打开“分析定义”(Analysis Definition) 对话框,并创建、编辑和运行分析。
创建静态分析:
1.单击 “机构分析”(Mechanism Analysis)。“分析定义”(Analysis Definition) 对话框打开。
2.输入名称或接受默认名称。
3.在“类型”(Type) 下,选择“静态”(Static)。
4.在“首选项”(Preferences)选项卡、“电动机”(Motors) 选项卡和“外部载荷”(External loads) 选项卡中键入值。
5.单击“运行”(Run) 来运行新分析,或单击“确定”(OK) 接受分析定义并稍后运行。
6.运行分析时,图形会显示最大加速度的变化,而模型显示到达的中间位置。
输入静态分析的首选项:
使用“分析定义”(Analysis Definition) 对话框的“首选项”(Preferences) 选项卡可指定静态分析的一般信息。
使用“锁定的图元”(Locked entities) 区域可指定锁定和禁用约束以进行分析。可锁定刚性主体和连接、禁用/启用连接或删除锁定的图元。锁定刚性主体在定义的分析期间将使某个刚性主体相对于另一刚性主体位置保持固定。锁定连接将移除和这些连接的自由度关联的运动。禁用的连接将被临时隐含并在分析时不予考虑。
使用“初始配置”(Initial configuration) 区域可选择静态分析的开始点。该配置描述了机构中零件和刚性主体的相对方位。选择下列选项之一:
•单击“当前”(Current) 使用刚性主体在屏幕配置中的位置。
•单击“快照”(Snapshot) 以选择使用“拖动”(Drag) 对话框保存的快照。只使用选定快照中机构刚性主体的位置。保存在快照中的所有约束均被忽略。
使用“最大步距因子”(Maximum step factor) 区域可更改静态分析的最大步距。如果模型中包括很大的加速度,则使用较小的步距可能会获得更精确的结果。必须清除“默认”(Default) 复选框,并输入一个 0.0 到 1.0 之间的实数。该因子会限制用以查找静态配置的最大步距。
定义后,可以立刻进行分析。单击“运行”(Run) 时,将检查分析中是否存在错误,检查方式与单击“确定”(OK) 时相同。对已定义的分析只是运行而并不添加到模型中。单击“确定”(OK) 后,软件会完成定义,创建分析并将分析定义添加到模型中。
示例:静态分析:
静态分析的结果为一稳定状态配置。在运行静态分析前,须考虑下列示例:
•摆锤 - 提升至某初始高度的摆锤,其静态位置为摆锤的最低点,在该点上所有的力均达到平衡且势能为零。摆锤不会象在动态分析中那样摆动。
•反弹球 - 将球举到平面以上某一初始高度然后释放,其静态位置为球静止在此平面上时的位置,在此位置处所有的力均平衡且势能为零。在此情况下,静态配置不考虑受撞击后球的反弹。
关于连接反作用测量:
反作用测量可计算连接处在外力作用下而产生的载荷。例如,可使用接头反作用测量来校验轴承是否超出了额定载荷。
使用“测量定义”(Measure Definition) 对话框定义连接反作用测量。您可以对坐标系进行设置以用作测量的参考系,也可以指定要测量哪个刚性主体的施加反作用力。
但是,选定连接的默认坐标系可能未与任何刚性主体的 WCS 或 LCS 相对应。选择“选择坐标系”(Select coordinate system) 复选框以选取特定坐标系。
选择了要测量的连接以及力或力矩的分量时,会在选定的连接上出现一个带阴影的彩色箭头,指示在计算过程中实际使用的方向。如果选择一个给出力或力矩模的分量,则不会出现任何箭头。仔细考虑此方向实际上是否是所需的力或力矩的方向。
可为以下类型的连接创建反作用测量:
•连接集 - 计算通过任一刚性主体上的接头施加的反作用力或力矩。可测量的力或力矩分量取决于连接集的类型。沿着运动轴的分量可能包括反作用作为运动轴限制的结果或作为沿运动轴的摩擦结果。
PS:要测量连接上作用力的总和 (如电动机和弹簧),请使用净载荷测量。
•凸轮从动机构连接 - 计算凸轮从动机构连接中两个凸轮之间接触点处的力。
PS:凸轮从动机构连接的反作用测量不包括对冲击力的计算。当凸轮相互接触时,可测量允许升离的凸轮从动机构连接上的反作用力,但是,如果凸轮分开,则反作用力值将为零。如果凸轮在分析期间数次升离和接触,即凸轮反弹,可使用碰撞测量或冲量测量来监测接触事件。
•可测量凸轮从动机构连接的以下分量:
◦“法向力”(Normal force) - 在接触点处垂直于凸轮从动机构连接的反作用力。在给定的参考系中,正的反作用力将连接中的两个凸轮推靠一起,而负的反作用力使它们分开。
◦“切向力”(Tangential force) - 在接触点处与凸轮从动机构连接相切的反作用力。切向力使凸轮彼此相对滑动。
◦“滑动”(Slip) - 检查凸轮从动机构连接是否在力平衡分析期间出现滑动。如果发生滑动,则测量返回值 1。如果没有发生滑动,则返回的值为 0。
•槽从动机构连接 - 计算通过任一刚性主体上的槽施加的力。当从动机构达到槽的一个终点或槽轴上存在摩擦现象时,会施加更多力。
•齿轮副 - 计算施加到齿轮副其中一个刚性主体上的反作用力或扭矩。对于有旋转运动轴的齿轮,可测量施加到该轴上的扭矩。对于有平移运动轴的齿轮 (例如齿条和齿轮齿轮副中的齿条),可测量施加到该轴上的线性力。您还可以使用动态齿轮来测量影响间距点的各种力以及作用在间距圆的圆心上的力矩。
•带 - 估算带对其任何滑轮轴施加的扭矩。一组滑轮可用于选定带。
•3D 接触 - 估算 3D 接触的接触点处的力。分量及其含义与凸轮从动机构连接类似。主要区别在于 3D 接触碰撞出现在一段时间之后,而凸轮碰撞是瞬间发生的。为此,3D 力计算接触包括碰撞。
创建连接反作用测量:
1.单击 “测量”(Measures)。“测量结果”(Measure Results) 对话框打开。
2.单击新建 。“测量定义”(Measure Definition) 对话框打开。
3.为测量键入一个描述性名称或接受默认名称。可创建接头、槽、齿轮副、带和 3D 接触的测量。
4.在“类型”(Type) 下选择“连接反作用”(Connection Reaction)。
5.选择一个连接。该连接的名称显示在“连接”(Connection) 收集器中。可为反作用测量设置的单位以蓝色显示在“类型”(Type) 下的测量列表旁边。可为连接测量的力或力矩显示在“分量”(Component) 下的列表中。
PS:要可靠地选择某一特定连接,请使用查询模式。
6.从列表中选择一个元件。在模型上出现一个着色箭头,指示选定分量的方向。
7.选择一种评估方法。
8.单击“确定”(OK)。
9.用图形表示测量。
要使用特定坐标系创建连接反作用测量:
您必须位于“测量结果”(Measure Results) 对话框 (“测量”(Measures)) 上且已定义一个连接反作用测量,才能按此步骤操作。
1.单击新建 。“测量定义”(Measure Definition) 对话框打开。
2.选择“选择坐标系”(Select coordinate system) 复选框以定义测量的特定参考坐标系。可为连接测量的力或力矩显示在“分量”(Component) 下的列表中。
3.单击“表示为”(Expressed in) 下的 ,然后选择一个坐标系。
4.从列表中选择一个元件。在模型上出现一个着色箭头,指示选定分量的方向。
5.在“作用于”(Exerted on) 收集器中,选择“刚性主体 1”(Rigid Body 1) 或“刚性主体 2”(Rigid Body 2)。刚性主体将被突出显示,并会在所选刚性主体上报告反作用力。
刚性主体 1 是指连接中的第一个刚性主体。例如,如果通过连接所连接的两个刚性主体为“基础”和“刚性主体 3”,则“基础”为第一个刚性主体,“刚性主体 3”为第二个刚性主体。如果两个刚性主体为“刚性主体 1”和“刚性主体 2”,则“刚性主体 1”为连接中的第一个刚性主体。与每个连接相关联的两个刚性主体即会显示在“模型树”中。
6.选择一种评估方法。
7.单击“确定”(OK)。
8.用图形表示测量。
创建净载荷测量:
1.单击 “测量”(Measures)。“测量结果”(Measure Results) 对话框打开。
2.单击新建 。“测量定义”(Measure Definition) 对话框打开。
3.为测量键入一个描述性名称或接受默认名称。
4.在“类型”(Type) 下,选择“净载荷”(Net load)。
5.单击“参考”(Reference) 下的 ,然后选择下列选项之一:
◦弹簧
◦阻尼器
◦伺服电动机
◦执行电动机
◦力
◦扭矩
◦运动轴
图元名称和载荷反作用测量的单位将显示在“类型”(Type) 下。同时,机构中出现一个着色箭头,指示作用的方向。
6.选择一种评估方法:
◦“每个时间步长”(Each time step)
◦最大值
◦最小值
◦整数
◦平均值
◦“均方根”(Root mean square)
◦“定时”(At time)
7.如果选择“定时”(At Time),请在“时间”(Time) 输入框内输入一个大于或等于零的实数值。
8.单击“确定”(OK)。
9.用图形表示测量。
创建测力计锁定:
对于此步骤,您必须处于“分析定义”(Analysis Definition) 对话框中,且已在“类型”(Type) 下选择了“力平衡”(Force Balance)。
1.单击
2.选择一个刚性主体。软件使用该刚性主体的 LCS 来参考方向矢量。选定点不必在此刚性主体上。
3.输入 X、Y 和 Z 分量,定义力的方向矢量。在选定的点上出现一个洋红色箭头,表示力的方向。
PS:如果模型是着色的,则用户可能看不到该箭头。
4.如果想创建另一个测力计锁定,则重复第 1 步到第 3 步。测力计锁定被命名为“测力计锁定 #”,每增加一个测力计锁定时,# 数递增。
PS:在一个给定的分析中,仅可有一个测力计锁定被激活。
关于碰撞测量:
碰撞事件测量报告在分析过程中是否发生接触。当连接到达其限制或两个凸轮相接触时,就可能发生接触。
软件在每一时间间隔检查碰撞事件,如果发生碰撞事件,则记录值 1;如果没有,则记录值 0。碰撞事件的图形显示为一条模为 1 的竖直线,它表示在分析过程中的给定时间发生碰撞。
可为以下类型的连接创建碰撞测量:
•“运动轴”(Motion axis) - 测量运动到达其极限后的碰撞。创建碰撞测量前,必须指定运动轴限制。
•“凸轮从动机构连接”(Cam-follower connections) - 测量两个凸轮间的接触。创建碰撞测量前,在定义凸轮从动机构连接时,必须启用升离选项。
•“槽从动机构连接”(Slot-follower connections) - 当槽从动机构到达其端点时测量碰撞。
创建碰撞测量:
1.单击 “测量”(Measures)。“测量结果”(Measure Results) 对话框打开。
2.单击新建 。“测量定义”(Measure Definition) 对话框打开。
3.为测量键入一个描述性名称或接受默认名称。
4.在“类型”(Type) 下,选择“冲击”(Impact)。
5.单击
◦有限制的接头
◦启用升离的凸轮从动机构连接
◦槽从动机构连接
将显示连接的名称。
6.接受“每个时间步长”(Each time step) 为计算方法。
7.单击“确定”(OK) 接受定义并返回“测量结果”(Measure Results) 对话框。
8.用图形表示测量。
关于冲量测量:
冲量测量返回由碰撞引起的动量变化。此测量更侧重于从定量的角度来跟踪碰撞事件。在碰撞过程中,如果有一个随时间变化的力作用在对象上,则对象的动量将更改。根据以下方程可知,动量的变化与碰撞的力有关:
momentum = F(t) dt
可为以下类型的连接创建碰撞测量:
•运动轴 - 测量运动轴到达其极限后的动量变化。要测量冲量,必须指定运动轴限制和连接的还原系数。对于每种类型的连接,可在接头的 DOF 的方向上测量冲量。
•凸轮从动机构连接 - 测量在凸轮从动机构分离并重新连接后的动量变化。要测量冲量,必须启用升离选项并指定还原系数。可测量以下分量的冲量:
◦法向力 - 测量两个凸轮间接触点处的、与凸轮曲线垂直方向上的冲量分量。
◦切向力 - 测量在两个凸轮间接触点处与凸轮曲线相切的冲量分量。
•“槽从动机构连接”(Slot-follower connections) - 测量槽从动机构接触到其端点并发生碰撞后的动量变化。要测量冲量,必须指定还原系数。可选取开始或结束端点。
用于计算冲量的坐标系轴可能与 WCS 或机构中的任何 LCS 一致,也可能不一致。选择要测量的连接以及分量时,会在选定的连接上出现一个带阴影的洋红色箭头,指示在计算过程中实际使用的 X 或 Y 方向。确保仔细察看此方向,确定它实际上是否是所需的冲量测量方向。
关于回放:
单击“回放”(Playback) 打开“回放”(Playbacks) 对话框。使用“回放”(Playback) 命令查看机构中零件间的干涉情况、将分析的不同部分组合成一段影片、显示力和扭矩对机构的影响,以及在分析期间跟踪测量的值。
每次机构分析运行的结果被另存为独立的回放文件并可以在其他会话中运行。可用简化表示运行为主装配保存的结果,反之亦然。
可将回放结果集捕捉为 AVI 或 MPEG 文件或一系列 JPEG、TIFF 或 BMP 文件。也可保存运动包络,它捕捉机构在分析期间所扫描的体积块的表示。
关于回放对话框:
使用“回放”(Playbacks) 对话框查看分析结果集。还可以更改结果集的显示、检查干涉情况、指定播放结果集的时间长度,以及以几种不同格式将其保存。
•单击  回放分析并打开 “动画”(Animate) 对话框。使用选项可控制回放速度和方向。
回放分析并打开 “动画”(Animate) 对话框。使用选项可控制回放速度和方向。
•单击  恢复结果集。打开一个对话框,其中会列出以前保存的结果集文件。浏览并从磁盘选择一个已保存的结果集。
恢复结果集。打开一个对话框,其中会列出以前保存的结果集文件。浏览并从磁盘选择一个已保存的结果集。
•单击  将文件保存到磁盘上。“保存”(Save) 对话框打开。接受默认名称,或为结果集输入新名称。可将它保存在默认目录(即当前工作目录)中,也可进行浏览以选择另一目录。
将文件保存到磁盘上。“保存”(Save) 对话框打开。接受默认名称,或为结果集输入新名称。可将它保存在默认目录(即当前工作目录)中,也可进行浏览以选择另一目录。
回放文件具有 .pbk 扩展名。可在当前或以后的会话中检索此文件,以回放结果或计算测量值。保存的文件包括“显示箭头”(Display Arrows) 和“影片进度表”(Movie Schedule) 设置。
•单击 从会话中移除当前结果。
•单击  导出结果集。当前结果集被保存为带有 .fra 扩展名的帧文件。通过单击“文件”(File) > “保存副本”(Save a Copy) 并从“类型”(Type) 列表中选择“运动包络”(Motion Envlp),可在退出应用程序后使用 .fra 文件创建运动包络。有关详细信息,请在“帮助中心”中进行搜索。
导出结果集。当前结果集被保存为带有 .fra 扩展名的帧文件。通过单击“文件”(File) > “保存副本”(Save a Copy) 并从“类型”(Type) 列表中选择“运动包络”(Motion Envlp),可在退出应用程序后使用 .fra 文件创建运动包络。有关详细信息,请在“帮助中心”中进行搜索。
•单击  打开“创建运动包络”(Create Motion Envelope) 对话框。在当前会话中存在结果集或者已恢复 .pbk 文件后,此选项可用。使用此选项对在分析过程中由机构所创建的扫描体积块进行收缩包络。分析期间,在帧文件中捕捉到运动后,程序会创建一个代表模型完全运动的多面运动包络模型。可以使用与标准零件的相同方式导出运动包络。
打开“创建运动包络”(Create Motion Envelope) 对话框。在当前会话中存在结果集或者已恢复 .pbk 文件后,此选项可用。使用此选项对在分析过程中由机构所创建的扫描体积块进行收缩包络。分析期间,在帧文件中捕捉到运动后,程序会创建一个代表模型完全运动的多面运动包络模型。可以使用与标准零件的相同方式导出运动包络。
•“结果集”(Result Set) - 在当前会话中显示分析结果和已保存的回放文件。
•冲突检测设置 (Collision Detection Settings) - 指定结果集回放中是否包含冲突检测,包含多少以及回放如何显示冲突检测。
•“影片排定”(Movie Schedule) - 为回放指定开始时间和终止时间。
•“显示箭头”(Display Arrows) - 选择测量和输入载荷。在回放期间,软件将选定测量和载荷以三维箭头显示。
播放结果集:
1.单击 “回放”(Playback)。打开“回放”(Playbacks) 对话框。
2.从“结果集”(Result Set) 列表,选取当前会话中的结果集的分析的名称。
3.在下列选项卡上输入信息:
◦碰撞检测设置
◦影片排定
◦显示箭头
4.单击 。“动画”(Animate) 对话框打开。
5.设置运动回放的速度、方向和持续时间。也可以捕捉在其它软件中回放的动画。
6.单击“关闭”(Close)。
在回放期间跟踪测量:
在查看结果集回放的同时,可在回放过程中跟踪测量值的更改。
1.运行分析或恢复结果集。
2.在“测量结果”(Measure Results) 对话框中,创建某一测量的图形。
3.关闭“测量结果”(Measure Results) 对话框,但不要关闭“图表工具”(Chart-Tool) 窗口。可根据需要移动“图表工具”(Chart-Tool) 窗口或调整其大小。
4.单击 “回放”(Playback)。打开“回放”(Playbacks) 对话框。
5.选择与在步骤 2 中创建的测量关联的结果集或会话中的分析。
6.提供所需的信息。
7.单击 。“动画”(Animate) 对话框打开。设置分析回放的速度、方向和持续时间。
8.回放结果集时,随着机构的移动,会有一条红色竖直线同时在图形中移动,跟踪测量值。
PS:在“动画”(Animate) 对话框中的各选项也能控制测量跟踪线。例如,要在分析中对特定点的测量进行取样,单击 停止回放,并将指针移动到跟踪线位置。出现一条消息,其中包含有关测量值的信息。
关于影片进度表:
回放分析结果时,在“回放”(Playbacks) 对话框的“影片排定”(Movie Schedule) 选项卡中,可指定要查看的部分以及在回放期间是否要显示过去的时间。
•“默认排定”(Default Schedule) 复选框控制是否要查看整个分析。清除该框可指定要查看的分析部分。
•“显示时间”(Display Time) 复选框控制在回放期间是否在模型窗口中显示回放已用去的时间。取消选中可查看回放而不显示时间。
如果要查看指定的运行部分,请清空“默认排定” (Default Schedule) 复选框。此时可以选取下列选项:
•“开始时间”(Start Time) - 指定要查看的段的开始时间。开始时间可以大于终止时间,这样就可以反向播放影片。
•“结束时间”(End Time) - 指定要查看的段的终止时间。
•指定开始和终止时间后,单击 + 将段添加到回放列表中。通过多次将其添加到列表中,可以多次重复播放此片段。
•要更改回放段的起始和终止时间,请选择该段并编辑其数值。单击  更新列表中的段。
更新列表中的段。
•要删除影片段,选择该段并单击 。
将结果集保存到文件中:
1.单击 “回放”(Playback)。打开“回放”(Playbacks) 对话框。
2.选择一个结果集。
3.单击保存 。“保存分析结果”(Save Analysis Results) 对话框打开。
4.接受突出显示显示的文件名,或为已保存的结果集输入新名称。
5.接受当前工作目录或浏览选择另一目录。
6.单击“确定”(OK)。结果集将保存在扩展名为 .pbk 的文件中。
恢复已保存的结果集文件:
1.单击 “回放”(Playback)。打开“回放”(Playbacks) 对话框。
2.单击 。“选择回放文件”(Select Playback File) 对话框随即打开。
3.选择一个结果文件。
4.单击“打开”(Open)。如果当前模型与回放文件中的模型相匹配,回放文件的分析结果将被读入会话中。
PS:如果会话中已存在一个与回放文件同名的结果集,将出现一条警告信息。可以覆盖会话中的这些结果,或者选取不从回放文件中加载这些结果。
关于动画对话框:
回放动画结果集时,可使用“动画”(Animate) 对话框控制速度和方向。
|
按钮
|
功能
|
|---|---|
|
帧滑块
|
每次往前回放一帧并显示当前帧数
|
 |
回放结果集
|
 |
停止回放
|
 |
开始回放
|
 |
将回放重置到开始位置
|
 |
显示上一帧
|
 |
显示下一帧
|
 |
往前回放至结束
|
 |
设置连续回放
|
 |
在终点反转回放方向
|
|
速度滑块
|
调整回放速度
|
|
“捕获”(Capture) 按钮
|
打开“捕获”(Capture) 对话框,配置回放并将其另存为 avi 或 mpeg 文件,或另存为一系列 jpeg、tiff 或 bmp 文件。
|
捕捉回放结果集:
1.要打开“捕获”(Capture) 对话框,请执行下列步骤之一:
◦单击 “回放”(Playback)。“回放”(Playbacks) 对话框随即打开,单击 。
◦在“机构树”中右键单击回放结果集,然后单击  。
。
“动画”(Animate) 对话框打开。
2.单击“捕获”(Capture)。“捕获”(Capture) 对话框打开。
3.在“文件名”(File Name) 框中键入新名称,并接受默认值。要更改默认目录或覆盖现有文件,请单击“浏览”(Browse) 并选择目录或文件。
4.从“格式”(Format) 列表中选择一种格式:
◦如果选择 JPEG、TIFF 或 BMP,回放另存为一系列帧,其文件名按 (1-x) 顺序递增。
◦如果选择 MPEG 或 AVI,选取帧频(25、30 或 50 fps)。
5.在“分辨率”(Resolution) 框中,键入一个或多个输出文件的宽度和高度 (以像素为单位)。
6.单击或清除“渲染帧”(Render Frames) 复选框。要更改渲染设置,请单击“设置”(Settings)。“渲染设置”(Render Settings) 对话框随即打开。设置以下选项之一。
◦“最大样本数”(Maximum Samples) - 样本越多,质量越好、反射和阴影越准确。取样数趋近于无穷大时,图像会变的更加逼真。默认值为 6,移动滑块或在框中键入数字,以增加或减少样本数。
◦“最长时间”(Maximum Time) - 渲染器处理当前图像所花费的时间。当渲染器出于任何原因重新启动时,例如,移动了照相机或更改了实时设置,将重置此时间。默认值为 30 秒。使用箭头增加或减少小时、分钟和秒数,或在相应的框中键入数字。
有关详细信息,请在“帮助中心”中搜索“渲染”。
7.选择录制 .avi 或 .mpeg 文件的“帧频”(Frame rate)。
8.从列表中选择 .avi 时,可选择接受默认的“未压缩”(Uncompressed) 或配置压缩:
a.单击“压缩”(Compression) 框中的箭头,然后选取“从列表中选择”(Select from list)。Video Compression 对话框随即打开。
b.从列表中选取压缩器。设置您选取的压缩器的可用选项。
PS:
•一旦回放被捕获压缩设置便不可撤消。
•AVI 捕获可能由于多种原因而失败。确保所有压缩设置均已正确配置或参考相关软件。
9.单击“确定”(OK) 开始录制。
创建运动包络:
运动包络模型表示分析期间机构的完全运动。要按照此步骤创建运动包络,必须在“回放”(Playbacks) 对话框中操作。在当前会话中,最近运行的结果集必须可用,或者可以使用一个已保存的 .pbk 文件。
1.单击 。第一次使用此结果集创建运动包络时,会出现一个消息框,要求您确认是否要创建名为 result_set_name.fra 的帧文件。
2.单击“是”(Yes)。“创建运动包络”(Create Motion Envelope) 对话框打开。
3.在“质量”(Quality) 区域内,为创建运动包络模型指定质量级。单击这些箭头或键入一个 1 到 10 范围内的整数 (默认值为 1)。
4.单击“元件”(Components) 下的 以从运动包络移除装配中的子装配、零件或刚性主体。默认情况下,会选择所有零件和子装配。
5.要包括模型中的任何骨架或面组,可以清除“特殊处理”(Special handling) 下的“忽略骨架”(Ignore skeletons) 或“忽略面组”(Ignore quilts)。
6.在对话框的“输出格式”(Output format) 区域,指定下列输出文件格式之一:
◦“零件”(Part) (默认) - 创建含普通几何的标准零件。
◦“轻量化零件”(LW part) - 创建包含轻量化及多面几何的轻量化零件。
◦STL - 创建 .stl 文件。
◦VRML - 创建 .vrl 文件。
7.在对话框的“输出文件名”(Output File Name) 区域,接受默认文件名或输入其它名称。
8.选择或清除“使用默认模板”(Use default template) (对于“零件”(Part) 及“轻量化零件”(Lightweight Part) 文件格式默认选择)。此选项对 STL 或 VRML 文件格式无效。
9.单击“预览”(Preview) 可获得运动包络的三角形的着色表示。一条消息会出现在消息区域中,其中包含所生成的三角形数目。
10.要调整运动包络模型,单击“颠倒三角对”(Invert triangle pairs) 旁边的 。单击着色表示时,三角形的边将被突出显示。单击两个三角形之间的边。系统将使用两个三角形的四个顶点所定义的四面体的另外两个三角形替换这两个三角形。如果自动计算出的运动包络不能精确反映出模型的运动,可使用此方法。
11.如果要反转颠倒三角对中的任何一个,单击“撤消上次操作”(Undo last) 或“撤消全部”(Undo all)。调整完成后,再次单击“预览”(Preview),然后单击“确定”(OK)。运动包络会保存到当前工作目录,源模型会作为当前对象保留在会话中。
关于创建运动包络对话框:
在运行分析或恢复 .pbk 文件后,单击“回放”(Playbacks) 对话框上的 打开“创建运动包络”(Create Motion Envelope) 对话框。使用这个对话框创建代表机构全部运动的多面实体运动包络模型。可以使用与标准零件的相同方式导出运动包络。
创建运动包络时必须定义以下设置:
•“质量”(Quality) - 使用箭头设置一个 1 到 10 范围内的值,以设置运动包络模型的质量级。
质量与用于创建多面模型的三角尺寸成反比。在较低的设置下,将较快地创建较少、较大的三角,粗略地表示出运动包络。当设置值较高时,将创建许多的小三角,使得生成的表示更细致、更精确。较高的质量级会生成更完整的表示,但同时也会增加创建时间。
好的做法应该是先以较低质量设置开始并预览结果,然后根据需要逐渐增大质量级。
•“元件”(Components) - 选取要纳入运动包络的机构内的零件、刚性主体或子装配。默认情况下,会选择所有元件,并在文本框中显示元件的个数。单击 并取消选择要排除的元件。
•“特殊处理”(Special handling) - 默认情况下,“忽略骨架”(Ignore skeletons) 和“忽略面组”(Ignore quilts) 复选框处于选中状态。要在创建运动包络时使用模型中的任何骨架或面组,则清除这些复选框。
PS:有关详细信息,请在“帮助中心”中搜索面组或骨架
•“颠倒三角对”(Invert triangle pairs) - 创建并预览运动包络后,可单击“颠倒三角对”(Invert triangle pairs) 访问这些选项并调整运动包络。如果自动计算的运动包络不能精确反映出机构的运动,可单击 ,然后单击两个三角形之间的边。系统将使用两个三角形的四个顶点所定义的四面体的另外两个三角形替换这两个三角形。
•“输出格式”(Output format) - 运动包络可保存为下列四种格式中的一种:
◦“零件”(Part) (默认) - 创建包含普通几何的零件文件 (.prt)。
◦“轻量化零件”(LW Part) - 创建具有轻量化、多面几何的轻量化零件 (.prt) 文件。
◦STL - 创建一个 .stl (Stereolithography) 文件。
◦VRML - 创建 VRML (.wrl) 文件。
PS:有关详细信息,请在“帮助中心”中搜索网格化文件。
•“输出文件名”(Output file name) - 默认运动包络文件根据源模型的名称来命名,格式为 model_name_env0001。当源模型是装配的简化表示时,运动包络模型的默认名称是 simplifiedrepname_env0001。系统自动为零件文件添加扩展名 .prt、为 STL 文件添加扩展名 .stl、为 VRML 文件添加扩展名 .wrl。
•“使用默认模板”(Use default template) - 如果已指定了默认模板,则系统会为运动包络零件使用该模板或起始模型。单击“文件”(File) > “选项”(Options) > “配置编辑器”(Configuration Editor) 设置配置文件选项 start_model_dir,以指定默认模板的位置。将模板用作起始模型,可将临界层、基准特征和视图包括在运动包络模型中。在运动包络模型被导出后,很难进行上述过程。
•单击预览 (Preview) 可获取有关在运动包络模型中将捕捉到的信息的图形和文本反馈。系统将显示运动包络模型的着色表示,消息窗口将显示组成模型的各个面的三角形的数量。
•单击“创建”(Create) 设置“零件”(Part) 或“轻量化零件”(Lightweight part) 的输出格式时,系统将创建一个实体运动包络模型。激活此模型,然后使用“文件”(File) > “保存”(Save) 将其保存到零件文件。
如果选定的输出格式是 STL 或 VRML ,则系统会将 .stl 或 .wrl 文件保存到当前工作目录中。“创建运动包络”(Create Motion Envelope) 对话框保持打开,源模型作为当前对象保留在会话中。
移除回放结果集:
1.单击 “回放”(Playback)。打开“回放”(Playbacks) 对话框。
2.选择一个结果集。
3.单击 。该结果集就从列表中消失,同时将从系统中移除与其关联的信息。
导出回放结果集:
1.单击 “回放”(Playback)。打开“回放”(Playbacks) 对话框。
2.选择一个结果集。
3.单击 将信息导出到 .fra 文件。
4.要使用 .fra 文件创建运动包络,请退出 Mechanism Design。
5.单击“文件”(File) > “保存副本”(Save a Copy),从“类型”(Type) 列表中选择“运动包络”(Motion Envlp)。
PS:有关详细信息,请在“帮助中心”中进行搜索。
关于将载荷转移到 Creo Simulate 结构模式:
在 Mechanism Design 中运行动态分析后,如果具有 Mechanism Dynamics 许可证,则可转移针对刚性主体计算出的反作用力和力矩,以用作“Creo Simulate 结构模式”中的载荷。要将载荷转移到 Creo Simulate,必须指定一项会话中的分析、一个刚性主体、与刚性主体关联的载荷,以及在分析期间计算载荷的时间。还必须选择包含刚性主体的零件、子装配或顶层装配以保存载荷。软件将载荷保存在一个载荷集中,您可将该集合应用于“Creo Simulate 结构模式”中的同一模型。
要将载荷转移到 Creo Simulate,必须:
•在 Mechanism Design 中运行分析,或恢复已保存分析。可使用动态、力平衡或静态分析。
•定义导出载荷集的方法。
•在 Mechanism Design 中保存元件文件。
•在“Creo Simulate 结构模式”中以载荷集形式导入结果。
在转移到“Creo Simulate 结构模式”中,包括以下载荷:
•凸轮、槽、齿轮、伺服电动机和接头反作用力
•执行电动机、弹簧和阻尼器载荷
•测力计锁定载荷
•重力
•惯性
•外部力和扭矩
单击“分析”(Analysis) > “在仿真中使用”(Use in Simulation) 时,只要存在可用的结果集,“载荷导出”(Load Export) 对话框便会打开。使用“载荷导出”(Load Export) 对话框指定用于创建 Mechanism Design 载荷集的结果集、分析时间和元件。
要使用已转移的载荷,请单击“应用程序”(Applications) > Simulate 以打开“Creo Simulate 结构模式”。单击“载荷”(Loads) > “机构载荷”(Mechanism Load)。载荷集将被命名为 MechanismLoadSetx,其中的 x 为数字。
有关将载荷导入“Creo Simulate 结构模式”的信息,请在“帮助中心”中进行搜索。
关于载荷导出对话框:
单击“分析”(Analysis) > “在仿真中使用”(Use in Simulation) 访问“载荷导出”(Load Export) 对话框。基于下列动态分析类型定义载荷集:
•“结果集”(Result set) - 选择在当前会话中生成的其中一个分析结果集。可使用来自动态、静态或力平衡分析中的结果。
•“刚性主体”(Rigid Body) - 选择装配中在选定分析期间用于计算载荷的刚性主体。
•“元件”(Component) - 选择一个零件、子装配或装配。载荷集作为元件文件的一部分被保存。选取选择用于载荷计算的刚性主体所包含的元件。
•“估算”(Evaluate at) - 从列表中选择下列选项之一,以定义软件计算转移载荷集中所包括的载荷的方法。对于力平衡和静态分析,该区域无效,“结束”(End) 为默认项。
◦开始 (Start) 或结束 (End) - 分析的开始或结束时间,载荷列表显示该时间点上所有载荷的值。
◦“时间”(Time) - 在输入框中为时间输入一个正实数值。针对该时间,载荷列表会显示载荷值,并且模型会根据该分析时间而转换到相应位置。
◦“单个最大载荷”(Single max. load) - 当分析过程中特定载荷达到其最大值时,系统确定该时间,并计算该时间点上的所有载荷。选择该选项时,会出现一个列表,其中包含所有的可用载荷。选择感兴趣的载荷,以显示在载荷值达到最大时的分析时间。载荷列表显示选定载荷的最大值,以及同一分析时间点上所有其它载荷的值。
◦“所有载荷的最大值”(Max. for all loads) - 软件显示列表中每个载荷的最大值,而不考虑分析过程中最大值出现的时间。
•“载荷信息”(Load information) - 一个与所选刚性主体相关联的载荷列表,具有如“评估”(Evaluate at) 选项所指定的每一载荷的模。选中要包括在转移到 Creo Simulate 载荷集中的载荷旁边的框。
当用户突出显示载荷时,会在模型上出现一个带阴影的箭头,指示力、力矩、速度或加速度作用的方向。
•单击  或
或  一次性选中或清除所有载荷复选框。
一次性选中或清除所有载荷复选框。
关于载荷信息列表:
定义要导出的载荷集时,可使用“载荷导出”(Load Export) 对话框中的下列载荷类型。通常,载荷的名称与定义力和扭矩时所用的名称相同,以下情形除外:
•接头连接 - 单独列出反作用力和力矩,并将 _force 和 _moment 分别添加到在“元件放置”(Component Placement) 操控板中分配的连接名称中。例如,如果模型具有两个名为 Connection1 和 Connection2 的接头连接,将有四个载荷:Connection_Force_1、Connection_Moment_1、Connection2_Force_1 和 Connection2_Moment_1。
•“重力加速度”(Gravity Acceleration) - 载荷包括重力加速度和惯性加速度的平移分量。合并载荷在“载荷导出”(Load Export) 对话框中被命名为 Gravity_Accel。
•惯性载荷 - 包括离心力载荷的角速度和加速度分量,并分别以 Centrifugal1_Vel 及 Centrifugal1_Acc 的形式列出。在转移到 Creo Simulate 中时,这两个载荷会被合并为单个离心载荷。
切记 Creo Simulate 中命名规则所受的限制要多于 Mechanism Design 命名规则。Creo Simulate 中的文件名不能超过 32 个字符,也不能含有 usascii 字符、空格、特殊字符或者以数字开头。如果所转移载荷的名称违背上述任一条规则,则该名称会自动发生更改。
关于将载荷导出到 Creo Simulate 结构模式的指南:
创建要转移到 Creo Simulate“结构模式”的载荷集时,切记以下几点:
•每个元件文件只能保存一个载荷集。零件文件带有 .prt 扩展名,装配文件带有 .asm 扩展名。
•如果将载荷集再次保存到一个元件文件中 (在 Mechanism Design 的相同或不同会话中),则第二次导出会覆盖第一次的导出。
•如果为一个特定分析创建载荷集,然后重新运行该分析,则系统不会自动用新的分析结果更新该载荷集的值。必须再次创建载荷集。
•每个载荷集仅包括单个刚性主体的可测量载荷。
•载荷所使用的单位和用于保存载荷集的元件所用的单位相同。
•必须在您创建载荷集时所在的同一 Mechanism Dynamics 会话中运行分析。
•用元件文件保存载荷集后,必须在 Creo Simulate 中打开该元件文件才能访问此载荷集。如果元件是作为顶层装配一部分的零件或子装配,则无法打开顶层装配并访问 Mechanism Dynamics 载荷集。
•载荷导出只适用于 Creo Simulate 结构模式。
如何将载荷转移到 Creo Simulate 结构模式
此表描述了使用“载荷导出”(Load Export) 对话框创建载荷集以导出到 Creo Simulate“结构模式”时,Mechanism Design 中各种载荷所采用的形式。
|
机械载荷
|
导出的模拟载荷
|
|---|---|
|
连接集
|
|
|
运动轴反作用力
|
接头点位置的不关联 TLAP1 力
|
|
运动轴反作用力矩
|
接头点位置的不关联 TLAP 力矩
|
|
弹簧和阻尼器
|
|
|
点对点弹簧或阻尼器反作用力
|
连接点处不关联的 TLAP 力
|
|
平移运动轴上的弹簧或阻尼器反作用力
|
运动轴中心处不关联的 TLAP 力
|
|
旋转运动轴上的弹簧或阻尼器反作用力
|
运动轴中心处不关联的 TLAP 力矩
|
|
槽从动机构连接上的阻尼器
|
槽点位置不关联的 TLAP 力
|
|
槽阻尼器上合并的垂直及相切反作用力
|
|
|
伺服电动机和执行电动机
|
|
|
平移运动轴上的伺服或执行电动机反作用力及力矩
|
零参考平面与平移轴相交处的不关联 TLAP 力
|
|
旋转运动轴上的伺服或执行电动机反作用力矩
|
运动轴中心处不关联的 TLAP 力矩
|
|
凸轮从动机构连接
|
|
|
凸轮接触点处合并的垂直及相切反作用力
|
凸轮接触点处不关联的 TLAP 力
|
|
齿轮副
|
|
|
旋转运动轴上标准齿轮副的反作用力矩
|
运动轴中心处不关联的 TLAP 力矩
|
|
平移运动轴上齿条及小齿轮副的反作用力
|
运动轴中心处不关联的 TLAP 力
|
|
力/扭矩
|
|
|
施加到点上的力
|
点上的不关联 TLAP 力
|
|
点对点力
|
起始点处不关联的 TLAP 力
|
|
施加到刚性主体的扭矩
|
刚性主体重心处的非关联 TLAP 力矩
|
|
重力
|
刚性主体重心处的重力加速度
|
|
合并重力及惯性加速度的平移分量
|
|
|
惯性力
|
|
|
角速度 (作为 Centrifugal1_Vel)
|
具有速度及加速度分量的合并离心载荷
|
|
角加速度 (作为 Centrifugal1_Acc)
|
|
|
TLAP = 点上的总载荷
|
要将载荷导出到 Creo Simulate 结构模式:
必须在 Mechanism Design 中打开一个装配,并已运行一项分析,才能使用该程序。
1.单击“分析”(Analysis) > “在仿真中使用”(Use in Simulation)。“载荷导出”(Load Export) 对话框随即打开。
2.从“结果集”(Result Set) 列表中选择一个结果集。
3.单击“刚性主体”(Rigid Body) 区域中的 ,并使用常规选择方式在模型上选择一个刚性主体。刚性主体的名称以及该刚性主体的所有可用载荷和结果集均显示于“载荷信息”(Load information) 区域中。
4.在“元件”(Component) 区域中单击 ,然后在模型上或“模型树”中选择一个零件或子装配。
5.在“计算方式”(Evaluate at) 区域中选择下列方法之一:
◦时间 (Time) - 为分析时间输入一个实数值。
◦“开始”(Start) - 分析开始时间
◦“结束”(End) - 分析结束时间
◦“单个最大载荷”(Single max. load) - 从下拉列表中选择要获得其最大值的载荷。将显示最大出现时的分析时间。
◦“所有载荷的最大值”(Max. for all loads) - 显示所有载荷的最大值
6.在转移载荷集中要排除已列出的载荷,请清除“载荷信息”(Load information) 列表中相应载荷旁边的复选框。默认情况下,会选择所有的载荷。
7.单击“确定”(OK)。
8.单击“文件”(File) > “保存”(Save),保存模型。
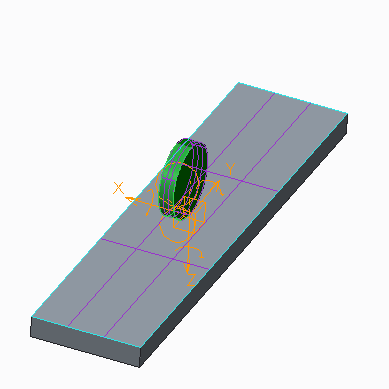
示例:凸轮装配的载荷转移:
下图显示了凸轮从动机构装配动态分析的回放。绿色箭头表示针对分析所创建测量的模和方向。双头洋红色箭头表示伺服电动机上的净载荷,而青色箭头则表示施加在凸轮上的法向力。
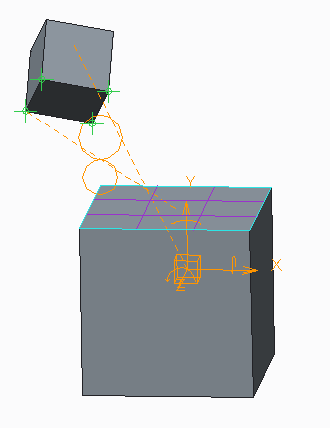
创建转移到 Creo Simulate 的载荷集时,对话框中会列出若干载荷,包括销钉接头上的力以及重力。对于本示例,仅选择凸轮载荷及伺服电动机载荷。凸轮载荷包括凸轮上的法向和切向力,但在此分析中,切向力为零。
下图显示在 Creo Simulate 中打开的凸轮零件。在导入 Mechanism Dynamics 载荷后,系统会创建两个基准点以应用载荷。凸轮载荷的基准点将于选定时间在两个凸轮之间的接触点位置创建。伺服电动机的基准点则在伺服电动机的零点位置创建。导入载荷后,零件上将显示指示导入载荷方向和模的图标。