关于“机构”用户界面:
使用“机构”(Mechanism) 选项卡上的命令来移动、评估和分析机构模型。
信息组:
可使用下列命令在浏览器中显示有关模型的信息。
•  “摘要”(Summary) - 显示与模型中图元有关的信息摘要。
“摘要”(Summary) - 显示与模型中图元有关的信息摘要。
•  - 显示模型中元件的质量、重心和惯量的列表。
- 显示模型中元件的质量、重心和惯量的列表。
•  - 打开“图元显示”(Entity Display) 对话框。
- 打开“图元显示”(Entity Display) 对话框。
•  - 显示模型中所有图元的详细摘要。
- 显示模型中所有图元的详细摘要。
“分析”(Analysis) 组
可使用下列命令来分析机构。
•“机构分析”(Mechanism Analysis) - 打开“分析定义”(Analysis Definition) 对话框。
•“回放”(Playback) - 打开“回放”(Playbacks) 对话框。
•“测量”(Measures) - 打开“测量结果”(Measure Results) 对话框。
•“分析”(Analysis) - 单击箭头可显示附加命令。
◦“轨迹曲线”(Trace Curve) - 打开“轨迹曲线”(Trace Curve) 对话框。
◦“在仿真中使用”(Use in Simulation) - 打开“负荷导出到结构”(Load export to Structure) 对话框以将负荷导出到 Creo Simulate。
运动组:
可使用下列命令来移动元件和拍摄快照。
•“拖动元件”(Drag Components) - 打开“拖动”(Drag) 对话框。
连接
可使用下列命令来创建机构的连接。
•  “齿轮”(Gears) - 打开“齿轮副定义”(Gear Pair Definition) 对话框。
“齿轮”(Gears) - 打开“齿轮副定义”(Gear Pair Definition) 对话框。
•  - 打开“凸轮从动机构连接定义”(Cam-Follower Connection Definition) 对话框。
- 打开“凸轮从动机构连接定义”(Cam-Follower Connection Definition) 对话框。
•  - 打开“3D 接触”(3D Contact) 选项卡。
- 打开“3D 接触”(3D Contact) 选项卡。
•  - 打开“带”(Belt) 选项卡。
- 打开“带”(Belt) 选项卡。
插入 (Insert)
可使用下列命令来配置机构上的力。
•  “伺服电动机”(Servo Motors) - 打开“伺服电动机定义”(Servo Motor Definition) 对话框。
“伺服电动机”(Servo Motors) - 打开“伺服电动机定义”(Servo Motor Definition) 对话框。
•  - 打开“执行电动机定义”(Force Motor Definition) 对话框。
- 打开“执行电动机定义”(Force Motor Definition) 对话框。  - 打开“力或扭矩定义”(Force or Torque Definition) 对话框。
- 打开“力或扭矩定义”(Force or Torque Definition) 对话框。
•  - 打开“衬套载荷”(BUSHING LOAD) 选项卡。
- 打开“衬套载荷”(BUSHING LOAD) 选项卡。
•  - 打开“弹簧”(SPRING) 选项卡。
- 打开“弹簧”(SPRING) 选项卡。
•  - 打开“阻尼器”(DAMPER) 选项卡。
- 打开“阻尼器”(DAMPER) 选项卡。
属性和条件组:
可使用下列命令向机构分配属性和条件。
•  “质量属性”(Mass Properties) - 打开“质量属性”(Mass Properties) 对话框。
“质量属性”(Mass Properties) - 打开“质量属性”(Mass Properties) 对话框。
•  - 打开“重力”(Gravity) 对话框。
- 打开“重力”(Gravity) 对话框。
•  - 打开“初始条件定义”(Initial Condition Definition) 对话框。
- 打开“初始条件定义”(Initial Condition Definition) 对话框。
•  - 打开“终止条件定义”(Termination Condition Definition) 对话框。
- 打开“终止条件定义”(Termination Condition Definition) 对话框。
刚性主体组:
可使用下列命令来操控机构中的刚性主体。
•“突出显示刚性主体”(Highlight Rigid Bodies) - 突出显示机构装配中的不同刚性主体。
•  - 打开“连接装配”(Connect Assembly) 对话框。
- 打开“连接装配”(Connect Assembly) 对话框。
•“重新定义刚性主体”(Redefine Rigid Bodies)  - 打开“重新定义刚性主体”(Redefine Rigid Body) 对话框。
- 打开“重新定义刚性主体”(Redefine Rigid Body) 对话框。
•“查看刚性主体”(Review Rigid Body)  - 在图形窗口中突出显示刚性主体以供您查看每个刚性主体中的不同元件。
- 在图形窗口中突出显示刚性主体以供您查看每个刚性主体中的不同元件。
关于机构树:
当您打开机构模型或创建一个新机构模型时,请单击 “应用程序”(Applications) > “机构”(Mechanism)。“机构树”出现在常规“模型树”的下方。与模型关联的所有刚性主体、连接、电动机、分析、回放和其他模拟图元均出现在模型树上。在“机构树”或模型中右键单击图元以访问快捷菜单。
“机构树”在单独的“刚性主体”(Rigid Bodies) 文件夹中显示模型的刚性主体。展开文件夹并右键单击某个刚体主体时,“信息”(Info) > “细节”(Details) 快捷方式随即出现。使用此快捷菜单来确定特定图元所属的刚体主体。
选择“机构树”中的图元
在“机构树”中进行选择时,会在模型上突出显示选定的图元。选择“重力”(Gravity) 时,基础主体 LCS 将突出显示显示,并且箭头指向重力加速度矢量方向。
PS:使用具有多个连接或电动机的大型模型时,从“机构树”中寻找指定的连接或电动机往往要比从模型中寻找容易的多。
使用机构树中的快捷菜单
下表列出了在“机构树”中右键单击某个图元后所出现的快捷菜单中的命令。在模型上右键单击某个图元时,也会出现类似的菜单。只有具有 Mechanism Dynamics 许可证,表中带星号的项在“机构树”中才可见。
|
图元 |
快捷菜单命令 |
结果 |
|---|---|---|
|
“机构”(MECHANISM) |
> “摘要”(Summary)
>
“细节”(Details) >
“质量属性”(Mass Property)设置 |
具有简短摘要的浏览器窗口
具有详细摘要的浏览器窗口
具有质量属性定义的浏览器窗口
“设置”(Settings) 对话框 |
|
刚性主体名称 (位于“刚性主体”(RIGID BODIES)下) |
>
“细节”(Details) |
具有选定刚性主体之详细摘要的浏览器窗口 |
|
*“重力”(GRAVITY) |
 >
“细节”(Details) |
“重力”(Gravity) 对话框
给出了重力和 WCS 方向的浏览器窗口 |
|
“连接”(CONNECTIONS)
“接头”(JOINTS)
“电动机”(MOTORS) |
无 |
|
|
“凸轮”(CAMS) |
新建 |
“凸轮从动机构连接定义”(Cam-Follower Connection Definition) 对话框 |
|
“槽”(SLOTS) |
转换槽 |
将槽转换为“装配”模式约束的确认对话框(用于先前版本中创建的机构)。 |
|
“齿轮”(GEARS)
“伺服”(SERVO) (在“电动机”(MOTORS) 下)
“力”(FORCE) (在“电动机”(MOTORS) 下)
“弹簧”(SPRINGS)
“阻尼器”(DAMPERS)
“力/扭矩”(FORCES/TORQUES)
“初始条件”(INITIAL CONDITIONS)
“分析”(ANALYSES) |
新建 |
选定图元的定义对话框 |
|
Cam_follower_connection_name |
 “复制”(Copy) “复制”(Copy) > “细节”(Details)
|
选定图元的定义对话框
具有选定图元之详细摘要的浏览器窗口 |
|
Servo_motor_name
* Force_motor_name
* Spring_name
* Damper_name
* Force_torque_name
* Initial_condition_name |
 “删除”(Delete)“复制”(Copy) “删除”(Delete)“复制”(Copy) >
“细节”(Details) |
选定图元的定义对话框
具有选定图元之详细摘要的浏览器窗口 |
|
Gear_name (在 > 下)。 |
“删除”(Delete) > “细节”(Details)
|
“齿轮副定义”(Gear Pair Definition) 对话框
具有选定齿轮副连接之详细摘要的浏览器窗口 |
|
“旋转轴”(Rotation Axis)、“平移轴”(Translation Axis) (在 > Joint_name下)。 |
伺服电动机
执行电动机
弹簧
阻尼器 |
“运动轴”(Motion Axis) 对话框
“伺服电动机定义”(Servo Motor Definition) 对话框
“执行电动机定义”(Force Motor Definition) 对话框
“弹簧”(Spring) 特征选项卡
“阻尼器”(Damper) 特征选项卡 |
|
“旋转轴”(Rotation Axis)、“平移轴”(Translation Axis) (在图元名称下) |
|
“运动轴”(Motion Axis) 对话框 |
|
Analysis_name |
“删除”(Delete)“复制”(Copy) 运行
> “细节”(Details)
|
“分析定义”(Analysis Definition) 对话框
“运行”(Run) 对话框:分析开始
具有分析定义详细摘要的浏览器窗口。 |
|
“回放”(PLAYBACKS) |
播放 (Play) |
“回放”(Playback) 对话框 |
|
Playback_name |
播放 (Play)
保存 (Save) |
“动画”(Animate) 对话框
保存回放文件 |
关于显示信息:
使用“信息”(Information) 组中的命令来查看模型信息。从中获得的摘要有助于理解对模型所做的更改以及观察其演化的进程。可以把摘要信息与模型的先前版本的模型摘要文件进行比较。
可在浏览器中显示以下信息报告:
•“摘要”(Summary) - 高级摘要,其中包括机构图元的信息和模型中存在的项数,但已指明处除外。对于非活动图元,无论它们在何处列出,都包括所有不完全的或被隐含的图元。
单击 “摘要”(Summary) 或右键单击“模型树”中的“机构”(Mechanism) 节点,然后选择“信息”(Info) > “摘要”(Summary)。
•“细节”(Details) - 包括所有图元及其相关属性。如果某个特定图元类型不存在 (如“执行电动机”),列出标题时便没有任何条目。非活动图元、隐含或不完整的图元都不会在详细摘要中列出。
单击 或右键单击“模型树”中的“机构”(Mechanism) 节点,然后选择“信息”(Info) > “摘要”(Summary)。
•“质量属性”(Mass Property) - 列出机构的质量、重心及惯性分量。
单击 或右键单击“模型树”中的“机构”(Mechanism) 节点,然后选择“信息”(Info) > “质量属性”(Mass Property)。
摘要包括突出显示模型上图元的按钮或显示信息页面的按钮。请参阅示例:详细摘要。
有关浏览器的详细信息,请在“帮助中心”中进行搜索。
示例:详细摘要:
在“机构树”中右键单击“机构”(Mechanism) 后,通过“信息”(Info) > “细节”(Details) 命令获取以下部分详细摘要信息。
当单击  并折叠浏览器窗口后,模型上会突出显示相应的图元。单击
并折叠浏览器窗口后,模型上会突出显示相应的图元。单击  时,在浏览器窗口中显示选定特征的有关信息 (见下表)。
时,在浏览器窗口中显示选定特征的有关信息 (见下表)。
PS:要将浏览器中的信息另存为文本文件,请将配置选项 info_output_format 设为 dbg_text 或 text。
机构报告:细节 (Details)
|
单位制
|
|
|---|---|
|
属性
|
值
|
|
单位
|
米千克秒 (MKS)
|
|
设置 (Settings)
|
|
|---|---|
|
属性
|
值
|
|
相对公差
|
0.001000
|
|
特征长度
|
0.534412
|
|
重力
|
|
|---|---|
|
属性
|
值
|
|
模
|
10.000000
|
|
方向 (Direction)
|
[0.000000, 0.000000, 0.000000]
|
|
属性
|
|
|---|---|
|
属性
|
值
|
|
类型
|
销钉
|
|
主体
|
||||
|---|---|---|---|---|
|
名称
|
类型
|
操作
|
说明
|
|
|
基础
|
主体
|
|
|
装配参考
|
|
body2
|
主体
|
|
|
元件参考
|
|
Connection_1.axis_1 (运动轴)
|
|
|---|---|
|
属性
|
值
|
|
类型
|
旋转
|
|
最小限制
|
-150.000000
|
|
最大限制
|
150.000000
|
|
恢复系数
|
0.000000
|
|
重新生成值
|
-90.000000
|
|
零位置偏移
|
0.000000
|
关于诊断机构故障:
当模型已断开连接或机构分析连接失败时,您可以诊断和解决机构故障。
为了帮助进行故障诊断,将在您的工作目录中创建下列文件。
•当重新生成失败时,会创建 pmech_conn_regen.txt 文件,并提供重新生成失败的完整报告。
•当分析失败时,会创建 pmech_conn.txt 文件,并提供无法闭合的运动环的完整报告。
您可以通过下列步骤来查看和诊断故障。
•在“通知中心”(Notification Center) 中,单击 。
•运行分析时,“机构断开连接”(Mechanism Disconnected) 对话框随即打开。单击“细节”(Details)。
默认情况下,“分析/装配故障的错误诊断”报告会在嵌入式浏览器中打开。您可以将 info_output_format 配置选项设置为 text,以在信息窗口中打开文本文件。
机构设计运动工作流:
如需详细信息,请选择左侧栏中的链接。
检测模型:
创建机构模型后,应该验证它的运动,以确定已定义的连接是否会产生预期的运动。可通过以下方式创建一个开放、活动的模型移动:
•单击“重新连接”(Reconnect) 运行装配分析。此过程也称为连接装配。如果装配已经连接,则运行装配分析不会移动机构。
•单击 “拖动元件”(Drag Components),以交互方式拖动刚性主体、研究机构的移动以及找出刚性主体的定位范围。打开“拖动”(Drag) 对话框。使用该对话框中的选项可禁用连接、粘结刚性主体,还可应用几何约束以获得特定配置。然后可将这些配置另存为快照,供以后参考使用。
为机构设计运动添加建模图元:
•添加伺服电动机 - 创建模型并确保其连接能允许其正确运动后,即可添加伺服电动机。使用伺服电动机可定义机构所需的绝对运动。伺服电动机可应用到运动轴或几何图元中。
PS:在先前版本的 Mechanism Design 中,伺服电动机被称为“驱动器”。
在运动类型的分析中使用伺服电动机可指定位置、速度或加速度。伺服电动机可移动模型,以便在不考虑所需力的情况下或在不考虑刚性主体间干涉的情况下满足指定的位置、速度或加速度要求。
由于伺服电动机定义运动轴的绝对旋转或平移运动,所以运动轴将失去与该运动关联的自由度 (DOF)。
•创建测量 - 如果要使用“最大”(Maximum)、“最小”(Minimum)、“整数”(Integral)、“平均”(Average)、“均方根”(Root Mean Square) 或“定时”(At Time) 这些计算方法来测量位置、速度或加速度,则必须在运行分析前创建测量。其它类型的测量可在运行分析后创建并可在查看结果时进行计算。
为位置或运动学分析做准备:
运行位置分析或运动学分析前,应完成以下一些操作。
•定义初始位置快照 - 如果希望运动分析从指定位置零件开始,请使用“拖动”(Drag) 对话框保存要使用的快照。
•创建测量 - 如果要使用“最大”(Maximum)、“最小”(Minimum)、“整数”(Integral)、“平均”(Average)、“均方根”(Root mean square) 或“定时”(At time) 这些计算方法来测量位置,则必须在运行分析前创建测量。
运行位置或运动学分析:
在 Mechanism Design 中运行运动学分析或位置分析时,软件将模拟机构的运动。可选取要在这些类型的分析中使用伺服电动机,并可指定其在分析期间的开始和终止时间。
运动学分析或位置分析是一系列的装配分析。但是,如果某个点在分析期间到达无法成功装配机构的位置,则分析将停止并提示用户继续。依据在“设置”(Settings) 对话框中选取的设置,在运行失败时可暂停或继续分析。
使用运动或位置分析,可得出模型在伺服电动机作用下的运动。可选取分析期间要使用的伺服电动机,并可指定其在分析期间的开始和终止时间。如果仅对模型某部分的运动感兴趣,可使用“分析定义”(Analysis Definition) 对话框内“首选项”(Preferences) 选项卡中的刚性主体锁定或连接锁定选项,以消除某些允许的自由度。
运动学分析和位置分析相似,但有一处重要的差异。运动学分析可计算机构中的点或运动轴的位置、速度和加速度,而位置分析只测量位置。因此,为运动学分析定义的任何伺服电动机轮廓必须能明确分辨。只能在位置分析中使用几何伺服电动机。
要在“机构动力学”中保存和查看分析结果
在 Mechanism Dynamics 中运行分析后,可有多种方法来使用分析结果:
•保存结果并检查干涉情况。如果要在其他会话中运行分析结果,则必须将其另存为回放文件。单击“回放”(Playback) 打开“回放”(Playbacks) 对话框。使用其中的选项保存、恢复、移除及导出分析结果。也可通过“回放”(Playbacks) 对话框回放分析及检查干涉情况。
•查看数据。单击 “测量”(Measures) 创建和绘制测量图形:
◦可创建多种类型的测量,以帮助理解由 Mechanism Dynamics 分析得到的数据。可创建的测量类型取决于运行的分析类型。如果在分析的每个时间步距都计算创建的测量,则可在运行一个或多个分析后创建并绘制图形,以描述值的变化。如果要使用任何其它计算方法,包括“最大”(Maximum)、“最小”(Minimum)、“整数”(Integral)、“平均”(Average)、“均方根”(Root mean square) 或“定时”(At time),必须在运行分析前创建该测量。
◦在机构分析期间可绘制分析特征值的图形。
◦可将测量图形保存到表格中。
◦可得到模型中的 DOF 和冗余数。
•创建轨迹曲线。运行分析后,单击“分析”(Analysis) > “轨迹曲线”(Trace Curve) 可生成轨迹曲线。轨迹曲线是机构运动的图形表示,可用于创建凸轮轮廓、槽轮廓或基准曲线。
•创建运动包络可表示在运动分析期间通过机构上的零件扫描的体积块。可将运动包络文件用作设计的一部分。
•创建一个待转移至 Creo Simulate 的载荷集。运行分析后,单击“分析”(Analysis) > “在仿真中使用”(Use in Simulation) 创建一个载荷集,其中包括机构中刚性主体所承受的所有惯性力、重力和反作用力。然后可在结构分析中使用该载荷集。
组装机构模型:
添加或更改伺服电动机、或更改连接定义后,应检查相关机构是否可正确组装。
1.单击 。“连接装配”(Connect Assembly) 对话框随即打开。
2.根据需要,锁定或解锁任何刚性主体或连接。锁定的刚性主体不会发生移动,并且锁定的连接不会更改其当前位置。这些设置仅对从此对话框运行的装配分析有效。
3.单击“运行”(Run)。
如果所有的连接均有效,该机构就重定位,成为完全组装的状态。
要编辑机构模型:
可以使用快捷菜单命令向已激活的子装配添加“机构”特征、重新定义元件或解决失败,而不必退出 Mechanism Design。
为机构设计创建模型:
为 Mechanism Design 分析创建模型包括以下任务:
•装配模型 - 使用预定义的连接集来定义各元件相对于彼此运动的方式。
•定义模型中的刚性主体 - 刚性主体是受刚性控制的一组零件,且组内没有自由度。如果两个零件之间由于装配过程中定义的放置约束而导致无自由度,则它们属于同一刚性主体。只能在两个不同的刚性主体间放置预定义连接集。如果机构未以预期的方式移动,或者因为两个零件在同一刚性主体内而不能创建连接,则可能需要在机构中重新定义刚性主体。
•指定连接参数 - 添加了连接后,可在“运动轴”(Motion Axis) 对话框中定义零参考、指定组装模型时软件使用的重新生成值以及限制允许的连接运动。
•创建特殊连接 - 添加其他类型的建模图元,如凸轮从动机构连接。不必首先创建特殊凸轮几何。仅在模型上选择几何图元。
也可创建运动齿轮副连接。通过选择运动轴来创建齿轮副。齿轮副连接可约束运动轴的相对速度。不必创建特殊齿轮几何。
提示:修复失败的装配:
有时候,在使用 (重新连接) 操作、拖动或运行位置分析时可能会找不到组装的配置。这可能是由于未正确指定连接信息,或者因为刚性主体的初始放置与最终的组装位置相距太远。
如果装配未能连接,应检查连接定义并确保已正确指定这些定义。应对所有连接在机构内的组合方式进行检查,以确保具有协调性。也可以锁定刚性主体或连接,并可移除环连接 (将零件环连回到自身的连接),以查看机构在不太复杂的情况下是否可组装。最后,可以通过创建新的子机构并研究它们如何独立工作来逐个查看机构的子系统。通过从可工作的机构中有系统地逐步扩展、并一次添加一个小的子系统,可以创建非常复杂的机构并使其成功运行。
如果位置分析在序列的某部分未能实现组装,则很可能是无效的伺服电动机值所造成的。如果用于指定伺服电动机的功能在某一时刻有一个值超出可取值的范围,从而导致机构分离,系统将显示一条消息,指出该机构不能组装。在这种情况下,要计算机构中所有伺服电动机的给定范围以及启动和结束时间。使伺服电动机功能的范围变小,是进行试验以确定有效范围的一个好方法。
伺服电动机也可能会使接头超过其限制。可关闭有可能出现此情形的接头的限制,并重新运行分析来研究这种可能性。
下列指南可帮助您:
•如果机构中有接头限制,则伺服电动机中的一个可能会使其超出这些限制。在“机构树”上或窗口中右键单击伺服电动机,并从快捷菜单中选取编辑定义 来更改限制。
•检查装配公差以确定是否应该更严格或再放宽一些,当装配已成功但机构不能按预期方式运转时更应如此。要更改绝对公差,可直接将其设置为装配中的所需值。另一种方法是调整特征长度或相对公差或两者同时调整。在装配级和零件级中的精度设置也能影响装配的绝对公差。
•检查锁定的刚性主体或连接。它们可能会导致机构失败。
•试着拖动刚性主体,使其靠近组装位置。
•如果更改装配的单位,机构图元的值(如伺服电动机轮廓以及平移运动轴的重新生成值)也会随之更改。在指定电动机和连接时,请注意对话框中的单位。通过单击“文件”(File) > “准备”(Prepare) > “模型属性”(Model Properties) 可检查装配中的单位设置。
•最后一个方法是使用“拖动”(Drag) 对话框禁用环连接。将机构重定位在靠近期望的位置,然后启用环连接。
定义机构设置:
通过更改相对公差或特征长度,或同时更改两者,可使用“机构设置”来更改绝对公差。
1.执行以下步骤之一:
◦单击“文件”(File) > “准备”(Prepare) > “模型属性”(Model Properties)。“模型属性”(Model Properties) 对话框随即打开。在“机构”(Mechanism) 行中,单击“更改”(change)。
◦右键单击“机构树”中的“机构”(Mechanism),然后从快捷菜单中选择“设置”(Settings)。
打开“设置”(Settings) 对话框。
2.清除“装配连接失败时发出警告”(Issue a warning when the assembly fails to connect) 复选框,以在装配失败时取消警告消息。
3.在“运行首选项”(Run preferences) 区域中,选择用于处理分析运行失败的首选项 (“分析运行失败时暂停”(Pause when analysis run fails) 或“分析运行失败时继续”(Continue when analysis run fails))。清除“运行过程中的图形显示”(Graphical display during run) 复选框,可在分析运行期间关闭图形显示,从而提高性能。
4.在“重新生成首选项”(Regeneration preferences) 区域中,选择一个首选项 (“移除”(Remove) 或“保持”(Maintain)),以在重新生成后处理分析运行结果。选择“使用重新生成值”(Use regeneration values) 复选框,以在分析运行中包括重新生成值。
5.可以更改“相对公差”(Relative tolerance) 和“特征长度”(Characteristic length) 设置,方法是在各自的框中键入一个新值。“相对公差”(Relative tolerance) 值应介于 1e-10 到 0.1 之间。通常默认值 0.001 即可满足要求。如果最大零件较最小零件大很多,应考虑更改“特征长度”(Characteristic length) 设置。
6.单击“确定”(OK)。
要定义碰撞检测设置:
您可以将回放设置为包括碰撞检测及其级别并包括在回放结果集时显示碰撞检测的方式。
1.单击“文件”(File) > “准备”(Prepare) > “模型属性”(Model Properties)。“模型属性”(Model Properties) 对话框随即打开。
2.在“碰撞检测”(Collision Detection) 行中,单击“更改”(Change)。“碰撞检测设置”(Collision Detection Settings) 对话框打开。
3.设置在回放过程中的碰撞检测级别。
◦“无碰撞检测”(No collision detection) - 未指定任何碰撞检测,即使发生碰撞,拖动操作也是平滑进行的。
◦“全局碰撞检测”(Global collision detection) - 在整个装配中检测到碰撞,并按照所选选项定义的方式显示碰撞。
◦“部分碰撞检测”(Partial collision detection) - 键入要检查碰撞的零件的名称。
4.选择“包括面组”(Include Quilts),以在将 highlight_interfering_volumes 配置选项设置为 Yes 时将曲面作为碰撞检测的组成部分。
5.选择“可选”(Optional) 来选取各类型碰撞检测的设置。这些设置仅用于“部分碰撞检测”(Partial collision detection) 或“全局碰撞检测”(Global collision detection)。
PS:
•更改“可选”(Optional) 设置可能会导致大量装配冻结。
•如果已选择“碰撞时铃声警告”(Sound warning upon collision),则会在发生碰撞时响起警告铃声。如果已选择“碰撞时停止动画回放”(Stop animation playback upon collision),则会在发生碰撞时停止回放。仅当 enable_advance_collision 配置选项设置为 Yes 时,这些选项才可用。
•也可以从“回放”(Playbacks) 对话框中配置碰撞检测设置。
6.单击“确定”(OK)。
关于高级拖动选项:
单击“高级拖动选项”(Advanced Drag Options) 上的箭头可展开“拖动”(Drag) 对话框,以显示附加选项:
•单击  打开“移动”(Move) 对话框,执行封装移动。
打开“移动”(Move) 对话框,执行封装移动。
•单击  为高级拖动操作指定当前坐标系。通过选取刚性主体来选择一个坐标系,所选刚性主体的默认坐标系是要使用的坐标系。X、Y 或 Z 平移或旋转将在该坐标系中进行。
为高级拖动操作指定当前坐标系。通过选取刚性主体来选择一个坐标系,所选刚性主体的默认坐标系是要使用的坐标系。X、Y 或 Z 平移或旋转将在该坐标系中进行。
•要指定 X、Y 或 Z 平移,单击下列图标之一来选择坐标方向,然后在模型上选择一个刚性主体。所做的选择使刚性主体仅沿为拖动操作选定的方向运动。沿其它方向的平移,以及刚性主体的旋转被锁定。
◦单击  指定沿当前坐标系的 X 方向的平移。
指定沿当前坐标系的 X 方向的平移。
◦单击  指定在当前坐标系的 Y 方向平移。
指定在当前坐标系的 Y 方向平移。
◦单击  指定沿当前坐标系的 Z 方向的平移。
指定沿当前坐标系的 Z 方向的平移。
•要指定 X、Y 或 Z 旋转,请单击下列图标之一来选择坐标方向,然后在模型上选择一个刚性主体。所做的选择使刚性主体仅围绕为拖动操作选定的轴线旋转。
◦单击  指定绕当前坐标系的 X 轴旋转。
指定绕当前坐标系的 X 轴旋转。
◦单击  指定绕当前坐标系的 Y 轴旋转。
指定绕当前坐标系的 Y 轴旋转。
◦单击  指定绕当前坐标系的 Z 轴旋转。
指定绕当前坐标系的 Z 轴旋转。
该对话框还显示下列选项:
•参考坐标系 (Reference Coordinate System) - 可使用选择器箭头在模型中选择坐标系。
•拖动点位置 (Drag Point Location) - 实时显示拖动点相对于选定坐标系的 X、Y 和 Z 坐标。
关于预定义约束集:
在装配中放置元件时,必须选取预定义的约束集。预定义的约束集有三个作用:
•定义在模型中放置元件时使用哪些放置约束
•限制刚性主体之间的相对运动,减少模型可能的总自由度 (DOF)
•定义一个元件在机构中可能具有的运动类型
选择预定义的约束集之前,必须了解如何使用放置约束和自由度来定义运动。然后可选择相应的连接以便可使您的机构按您所希望的运动方式运动。
每个预定义集都与唯一的一组几何图元 (包括点和基准轴) 关联。
有关约束集的详细信息,请在“帮助中心”中进行搜索。
关于重新定义已断开连接的元件:
打开在运动学上断开连接的机构装配时, 图标会出现在图形窗口下方。要修复连接,可重新定义元件放置、使用运动学拖动,如有必要还可同时执行这两个操作。
图标会出现在图形窗口下方。要修复连接,可重新定义元件放置、使用运动学拖动,如有必要还可同时执行这两个操作。
关于继承槽从动机构连接:
对于 Pro/ENGINEER Wildfire 3 ,槽从动机构连接在装配模式中被配置为装配设计的部分,而不是独立的“机构”功能。当在 Mechanism Design 中打开装配时,在 Pro/ENGINEER 的以前版本中配置的槽从动机构连接将手动进行转换。
•要转换继承槽,在图形窗口中或在“机构树”中右键单击它,然后从快捷菜单中选取编辑定义
•有多个槽的模型中所有槽在同一时间转换。有多个槽的模型中单个槽不能自行转换。
•只有在继承槽从动机构连接的参考仍然有效的情况下,才能对其进行转换。此类槽仅可在 Mechanism Design 下进行编辑,而且当选择时,将打开“槽从动机构”(Slot-Follower) 用户界面。
关于自由度:
如果要选择适当的约束来定义机构的运动能力,理解自由度的意义非常关键。自由度 (DOF) 的数量表示在系统中指定每个刚性主体的位置或运动所需的独立参数的数量。
预定义的约束集定义了两个刚性主体之间的连接。该约束集中的约束对刚性主体相对于彼此的运动起着限制作用,减少系统在总体上所可能具有的自由度。
完全不受约束的刚性主体有六个自由度:三个平移自由度和三个旋转自由度。各个约束都按特定的方式来限制运动。例如,如果对一个刚性主体应用销钉连接 (仅允许围绕轴进行旋转运动),则该刚性主体的自由度将从六减少到一。
选择一个应用至模型的预定义约束集前,应了解要对刚性主体进行限制的运动类型,以及要允许的运动类型。
常规连接和 6DOF 连接
使用常规连接可表示 DOF 与要定义给特定元件的 DOF 相同的那些连接。会存在常规连接与其他连接具有相同 DOF 数量的情况 (例如,球、圆柱或销钉连接)。创建常规连接后,它会作为坐标系出现在模型中。其 DOF 将显示为平移和旋转箭头。
可使用 6DOF 约束来表示具有三条旋转运动轴和三条平移运动轴的连接。模型元件彼此相对的运动不会变化,因为未应用任何实际的约束。6DOF 连接可以重新使用,以实现伺服电动机应用或为特定类型的连接建模。
当连接处于万向状态时,6DOF 或者万向节锁死连接的旋转自由度数量应减少一。在此情况下,总 DOF 数量也将减少一。
|
总自由度
|
旋转轴
|
平移轴
|
连接类型
|
与特定 DOF 关联的约束
|
|---|---|---|---|---|
|
0
|
0
|
0
|
“焊缝”(Weld) – 将两个刚性主体粘在一起。
|
|
|
0
|
0
|
0
|
“刚性”(Rigid) – 在更改底层刚性主体定义时将两个零件粘结在一起。受刚性连接约束的零件构成单一刚性主体。
|
|
|
1
|
0
|
1
|
“滑块”(Slider) – 沿轴平移。
|
面-面重合
|
|
1
|
1
|
0
|
“销”(Pin) – 绕轴旋转。
|
|
|
2
|
2
|
0
|
常规
|
点 – 点对齐 (如果点在边上)。
平面上的边。
|
|
2
|
1
|
1
|
“圆柱”(Cylinder) – 沿指定轴平移并绕该轴旋转。
|
直线上的点
面-面定向
|
|
2
|
0
|
2
|
常规
|
平面上的边,假定该平面既不与边垂直,也不与边平行。
面-面定向
|
|
3
|
3
|
0
|
“球”(Ball) – 以任意方向旋转。
|
点-点对齐
|
|
3
|
2
|
1
|
常规
|
平面上的边
线上的点(线和边必须对齐)
|
|
3
|
1
|
2
|
“平面”(Planar) – 通过平面约束连接的刚性主体在平面内相对运动。相对于垂直该平面的轴旋转。
|
面-面重合/平行
|
|
3
|
0
|
3
|
常规
|
面-面定向
平面 – 平面定向 (不与第一组平面平行)
|
|
4
|
3
|
1
|
“轴承”(Bearing) – 组合球连接和滑块连接。
|
边上的点
|
|
4
|
2
|
2
|
常规
|
平面上的边
|
|
4
|
1
|
3
|
常规
|
面-面定向
|
|
4
|
3
|
1
|
“槽”(Slot)
|
非直线轨迹上的点
|
|
3
|
3
|
0
|
“万向”(Gimbal) – 对齐两个坐标系的中心 (见下方)。
|
“点到点”(Point to point)
|
|
5
|
3
|
2
|
“常规”(General) (见下方)。
|
平面上的点
|
|
6
|
3
|
3
|
6DOF– 按任意方向平移及旋转 (见下方)。
|
除了连接集约束外,还必须考虑在模型上应用的伺服电动机所施加的约束。对伺服电动机施加减少自由度的位移、速度及加速度。
注意,仅应用必需的预定义的约束集来限制机构的运动。如果对机构进行过度约束,将会出现冗余,可能导致动态分析中出现不正确的反作用结果。
有关元件放置和约束集的更多详细信息,请搜索“帮助中心”的“装配”区域。
计算自由度和冗余:
在大多数机构系统或模型中,可使用下列公式确定自由度:
DOF = 6 x (number of rigid bodies not including ground) – constraints
假设使用两个销钉接头对门进行建模以表现两个铰接:
此模型具有一个刚性主体。两个销钉接头中的每个都具有5个约束。计算公式变为:
DOF = (6 x 1) – (2 x 5)
结果为 -4。
此时应使 DOF 等于 1。转动的门只有一个旋转自由度。如果要得到此模型的反作用结果,还需考虑冗余。计算公式变为:
DOF = 6 x (number of rigid bodies not including ground) – constraints + redundancies
使用此公式可解决带两个销钉接头的门模型的冗余问题:
1 = (6 x 1) – 10 + redundancies
1 = —4 + redundancies
5 = redundancies
为使模型具有一个 DOF,必须消除五个冗余项。可行的解决方案是将销钉约束替换为其他类型的约束集。例如,可以使用仅有一个约束的圆柱接头。确保要选取允许进行所需旋转运动的运动轴。
下列计算公式表明这种替代会将冗余降为 0:
DOF – redundancy = 6 x (number of rigid bodies not including ground) – constraints
DOF – redundancy = 6 x (number of rigid bodies not including ground) – constraints
1 – redundancy = 1
Redundancy = 0
使用“测量结果”(Measure Results) 对话框可获得机构中有关冗余的信息。
关于冗余:
冗余是不对刚性主体的运动施加任何限制的多余约束。在进行装配时,如果使用了限制装配中刚性主体运动的约束集,而且之后又添加了影响同一刚性主体的另一约束集并限制相同的自由度,则第二个接头是多余的。
如果执行动态分析时未将冗余考虑在内,则可能无法获取准确的测量连接反作用值或载荷反作用值。
例如,如果使用两个销钉连接作为铰接对门进行建模,则第二个销钉接头不会约束门的运动。当系统对分析进行计算时,将忽略冗余 (只考虑一个销钉连接)。其结果是反作用结果不正确,但运动正确。要得到完整且正确的反作用力,必须从机构中清除冗余。
另外,对于涉及位移、速度和加速度的严格的运动学问题,模型中的冗余将不会影响机构的设计和性能。
通过选择约束集可控制模型中的冗余。这些约束集必须可限制相同的自由度,但不能彼此相同。确定要使用的约束集后,可使用简单的公式计算自由度和冗余。
默认情况下,每次分析运动时,软件都将计算模型的自由度和冗余。要检查模型是否有冗余,请首先运行动态、静态或力平衡分析。运行力平衡分析时,请在“分析定义”(Analysis Definition) 对话框中计算自由度。使用“测量结果”(Measure Results) 对话框来计算机构中的自由度和冗余。
关于运动轴设置:
由“运动轴”设置来控制机构中的运动轴。可使用“运动轴”(Motion Axis) 对话框中的选项来设置:
•由运动轴连接所连接的刚性主体的当前位置
•用于定义运动轴零位置的几何参考
•运动轴重新生成的位置
•运动轴所允许的运动限制
•阻碍轴运动的摩擦力
不能为球接头定义运动轴设置。此外,不能编辑属于多旋转 DOF 连接(例如:6DOF 连接或一般连接)的旋转运动轴。
拖动模型时,您在“运动轴”(Motion Axis) 对话框中定义的设置用于执行分析。如果定义了伺服电动机或弹簧的未拉伸长度,即在所有运动开始前,将使用零点定义。
关于运动轴对话框:
可通过“运动轴”(Motion Axis) 对话框来查看定义连接的运动轴,并应用或编辑参考、零位置、重新生成值以及运动限制:
•“运动轴”(Motion Axis) 收集器 - 显示当前运动轴参考。
•当前位置 (Current Position) - 拖动机构或输入一个值并按下 ENTER 键时,显示当前运动轴位置。
•“设置零位置”(Set Zero Position) - 将当前位置定义为运动轴零点,其他方向均从该点测量。
PS:只有在“元件放置”操控板中设置初始位置参考前,该按钮才会出现在继承机构中。
•“重新生成值”(Regen Value) - 设置装配分析中所使用的值。
•“最大限制”(Maximum Limit) 和“最小限制”(Minimum Limit) - 设置对运动轴的运动进行限制的值。
•“动态属性”(Dynamic properties) 按钮 - 定义恢复系数并指定摩擦。
•“预览”(Preview) - 应用所有对话框条目。
指定运动轴设置:
1.从“机构树”中或直接在模型上选择运动轴。右键单击,然后从快捷菜单中选取编辑定义 。“运动轴”(MOTION AXIS) 对话框打开。
2.选择参考。
3.单击拖动控制滑块设置模型位置或在“当前位置”(Current Position) 框内输入角度或距离的新值。如果值超出所设置的最小和最大限制范围,将显示错误信息。
4.单击  。在“当前位置”(Current Position) 字段中输入的值将成为“重新生成值”(Regen Value)。
。在“当前位置”(Current Position) 字段中输入的值将成为“重新生成值”(Regen Value)。
5.要将该值用作重新生成值,请选择“启用重新生成值”(Enable regeneration value) 复选框。
6.单击“动态属性”(Dynamic properties) 按钮,为轴的运动设置限制并指定摩擦。
7.单击“预览”(Preview) 按钮以预览使用了新设置的模型。
8.单击“确定”(OK)。
关于重新生成值:
重新生成值用于定义运动轴相对于其零点的方向,实际上用于约束重新生成期间运动轴的自由度。在您选中“启用重新生成值”(Enable regeneration value) 复选框并输入一个值之后,所输入的值将在每次重新生成模型时用于替换运动轴的零点。
尽管在“装配”模式下配置的运动轴可见,但也必须在不同运动轴间的碰撞可见的 Mechanism Design 中重新定义它们。在“装配”中,每个运动轴都独立进行配置且碰撞运动限制不可见。
设置重新生成值:
1.从“机构树”中或直接在模型上选择运动轴。右键单击,然后从快捷菜单中选取编辑定义 。“运动轴”(MOTION AXIS) 对话框打开。
2.选择装配零参考。
3.拖动模型或在“当前位置”(Current Position) 框中输入值,然后单击 将其设置为“重新生成值”(Regen value)。
4.在模型重新生成时,选择“启用重新生成值”(Enable regeneration value) 复选框以将此值用作零点。
5.在 -360º 与 360º 之间为旋转轴设置“最小限制”(Minimum Limit) 和“最大限制”(Maximum Limit) 的运动范围。对于平移轴,在 -180º 与 180º 之间设置“最小限制”(Minimum Limit),小于或等于最大值;在 -180º 与 180º 之间设置“最大限制”(Maximum Limit),大于或等于最小值。
6.单击确定 。
设置范围限制:
1.从“机构树”中或直接在模型上选择运动轴。右键单击,然后从快捷菜单中选取编辑定义 。“运动轴”(MOTION AXIS) 对话框打开。
2.键入“最小限制”(Minimum Limit) 和“最大限制”(Maximum Limit) 的值。
PS:拖动模型,以确保极限是否可提供预期的运动范围。
3.单击“动态属性”(Dynamic properties) 按钮。
4.选择“恢复系数”(Coefficient of Restitution) 复选框并输入值。
5.单击确定 。
关于动态属性:
可通过单击“运动轴”(Motion Axis) 对话框中的“动态属性”(Dynamic properties) 按钮来访问“恢复系数”(Coefficient of Restitution) 和“启用摩擦”(Enable Friction) 设置。
•“恢复系数”(Coefficient of restitution) - 模拟运动轴达到其极限后的冲击力。
•“启用摩擦”(Enable Friction) - 模拟摩擦,即阻碍轴曲面间相对运动的阻力。力的作用方向与轴的运动方向相反。摩擦系数(静态或动态)决定力的模。这两种摩擦系数都取决于所接触材料的类型。可在物理或工程书籍中查找各典型曲面组合的摩擦系数表。
◦  静摩擦系数 (Static Coeff. of Friction) - 指定摩擦力,当摩擦力达到某一极限并开始运动前,该摩擦力可阻碍轴曲面的相对运动。静摩擦系数大于等于动摩擦系数。
静摩擦系数 (Static Coeff. of Friction) - 指定摩擦力,当摩擦力达到某一极限并开始运动前,该摩擦力可阻碍轴曲面的相对运动。静摩擦系数大于等于动摩擦系数。
◦  动摩擦系数 (Kinetic Coeff. of Friction) - 指定阻碍轴曲面的相对自由运动并可导致运动速度减慢的摩擦力。
动摩擦系数 (Kinetic Coeff. of Friction) - 指定阻碍轴曲面的相对自由运动并可导致运动速度减慢的摩擦力。
◦  接触半径仅限旋转轴 (Contact Radius for a rotation axis only) - 指定运动轴和接触点之间的距离值。该值应大于零。该值定义了摩擦扭矩所作用的圆形区域的半径。
接触半径仅限旋转轴 (Contact Radius for a rotation axis only) - 指定运动轴和接触点之间的距离值。该值应大于零。该值定义了摩擦扭矩所作用的圆形区域的半径。
指定摩擦:
1.在“运动轴”(Motion Axis) 对话框中,单击“动态属性”(Dynamic properties) 按钮,然后选择“启用摩擦”(Enable friction) 复选框。
2.为下列动态属性输入值:
◦ (静摩擦系数)
◦ (动摩擦系数)
◦ (接触半径)
3.单击“确定”(OK)。
关于恢复系数:
要模拟冲击力,必须指定恢复系数的值。恢复系数为两个图元碰撞前后的速度比。典型的恢复系数可从工程书籍或实际经验中得到。
恢复系数取决于材料属性、刚性主体几何以及碰撞速度等因素。对机构应用恢复系数可在刚体计算中模拟非刚性属性。
例如,完全弹性碰撞的恢复系数为 1。完全非弹性碰撞的恢复系数为 0。橡皮球的恢复系数相对较高。而湿泥土块的恢复系数值接近 0。
关于凸轮从动机构连接:
单击 访问“凸轮从动机构连接定义”(Cam-Follower Connection Definition) 对话框,并创建或编辑凸轮从动机构连接。
通过在两个刚性主体上指定曲面或曲线来定义凸轮从动机构连接。不必在创建凸轮从动机构连接前定义特定的凸轮几何。
如果要允许凸轮从动机构连接在拖动操作或分析运行期间分离,则必须在“属性”(Properties) 选项卡中选择“启用升离”(Enable Liftoff) 选项。如果具有 Mechanism Dynamics 许可证,即可为允许升离的凸轮定义摩擦系数和恢复系数。
定义和使用凸轮从动机构连接时,切记如下要点:
•可在拖动操作中使用凸轮从动机构。
•软件将凸轮定义为在拉伸方向上无限延伸。
•凸轮从动机构连接不会防止凸轮倾斜。必须对某一零件增加附加接头来防止倾斜。
•每个凸轮只能有一个从动机构。如果要为一个具有多个从动机构的凸轮建模,必须为每个新的连接副定义新的凸轮从动机构连接,必要时可为各连接的其中一个凸轮选择相同的几何。
例如,假如您正在构建一凸轮从动机构连接,而此连接是由一个绕着 L 形支架的圆柱组成。当圆柱到达 L 形支架的直角部位时,您可能希望确保圆柱与支架的水平及竖直部分在该点同时保持接触。要做到这一点,可在圆柱与支架水平板之间创建一个凸轮从动机构连接,在圆柱与支架竖直板之间创建另一个凸轮从动机构连接。
创建凸轮从动机构连接:
可在机构中两个刚性主体上的曲面或曲线间创建凸轮从动机构连接。开始此过程前,无需将某一刚性主体定义为凸轮。
1.单击 。“凸轮从动机构连接定义”(Cam-Follower Connection Definition) 对话框打开。
2.输入新名称或接受默认名称。
3.单击“凸轮 1”(Cam1) 选项卡。
4.单击  ,然后在第一刚性主体上选择曲面或曲线来定义第一个凸轮。单击“确定”(OK) 确认选择。
,然后在第一刚性主体上选择曲面或曲线来定义第一个凸轮。单击“确定”(OK) 确认选择。
5.在选择凸轮时,请切记以下几点:
◦如果选择了“自动选择”(Autoselect) 框,则在选择第一个曲面后将自动选取凸轮的曲面。如果有多个可供选择的相邻曲面,则系统会提示您再选择一个曲面。
◦选择凸轮曲面后,曲面的法向将以洋红色箭头标明。
◦如果选择直线或边,对话框将展开,并激活“工作面”(Working Plane) 收集器。使用选择箭头选择点、顶点、平面实体面或基准平面以定义凸轮的工作面。可只为两个凸轮中的一个选择直线或边。
6.如果要反转凸轮曲面的法向,请单击“反向”(Flip)。如果选定的曲面位于一个体积块上,则默认的法向将朝外,且“反向”(Flip) 将处于非活动状态。曲面法向指出了进行凸轮接触时所使用的一侧。
7.如果选择了一个曲面,请使用以下项来将凸轮定位到该曲面上。
◦自动 (不适用于曲线、边或平整平面曲面)
◦前面和后面
◦前面、后面和深度
◦中心和深度
8.单击“凸轮 2”(Cam2) 选项卡并执行步骤 5 到步骤 7 的操作。
9.在“属性”(Properties) 选项卡上输入信息。
10.单击“确定”(OK)。
定义凸轮从动机构连接的属性:
1.在“凸轮从动机构连接定义”(Cam-Follower Connection Definition) 对话框中,选择“属性”(Properties) 选项卡。
2.选择“启用升离”(Enable liftoff) 复选框。
3.在  文本框中,输入恢复系数值。
文本框中,输入恢复系数值。
4.如果要模拟摩擦,请选择“启用摩擦”(Enable friction) 复选框。
5.在 文本框中输入静摩擦系数值。
6.在 文本框中输入动摩擦系数值。
关于允许升离的凸轮从动机构连接:
在拖动操作或运动运行过程中,可指定凸轮从动机构连接中的两个刚性主体是否保持接触。
•如果在“凸轮从动机构连接定义”(Cam-Follower Connection Definition) 对话框中选择“启用升离”(Enable Liftoff),则在拖动操作或分析运行过程中,将允许这两个凸轮分离和碰撞。如果这两个凸轮碰撞,它们不会互相穿插。
•如果启用升离,也可定义凸轮从动机构连接的恢复系数。这个值将决定能量损失,这一损失由凸轮分离后再相互碰撞的冲击产生。
•如果不选择“启用升离”(Enable liftoff),这两个凸轮将保持接触。
关于凸轮从动机构连接设计:
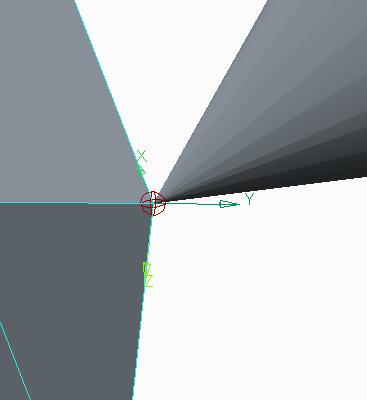
要成功设计凸轮从动机构连接,必须了解工作面的概念。执行分析时,会将所有通过曲面或曲线创建的凸轮视作二维凸轮。选择曲面时,软件会将该曲面解释为在深度方向上无限延伸的对象。选择曲线时,必须指定深度方向,而且会在此方向上拉伸凸轮以实现可视化目的。工作面与深度或拉伸方向正交。
PS:在凸轮从动机构连接的创建过程中以洋红色箭头进行显示的凸轮法线位于工作面内。
设计凸轮从动机构连接:
设计凸轮从动机构连接时,最好直观地在工作面内以二维图形的形式表示凸轮。如果两个凸轮在工作面内的某个点处相接触,将会获得较为理想的结果。尽可能避免连接沿工作面中一条线而分布的设计。
在图的下列表中,假定工作面与视图平面重合。拉伸方向指向(垂直于)视图平面内。在左图像中,工作面中两个凸轮之间的连接出现在一点上。在三维视图中,连接是垂直于工作面的一条线。
在右图像中,工作面中两个凸轮之间的连接出现在位于该工作面内的一条线上。在三维视图中,连接是沿平面分布。
|
可接受接触
|
不可接受接触
|
 |
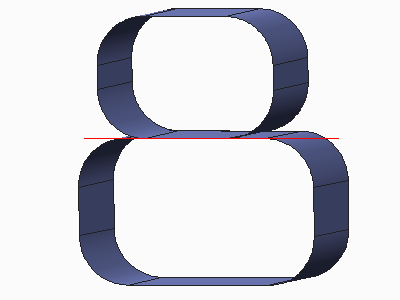 |
设计原则
切记:
•要获得较为理想的结果,在三维空间中建模凸轮时,应使它们沿一条垂直于工作面的直线相接触。避免两个凸轮上出现平面。
•为确保运行正确且可靠,含有二维凸轮的工作面应始终保持平行。应在凸轮主体之间定义约束或附加连接以使拉伸方向保持平行。
关于用于凸轮从动机构连接的曲面:
可以选择任意一组属于单个刚性主体的邻近、延伸曲面。拉伸曲面必须垂直于曲线所在的平面。该曲面只能沿一个方向弯曲(它们不能弯成弓形)。
例如:
|
可接受曲面
|
不可接受曲面
|
|---|---|
 单向曲面曲线
|
 曲面呈弓形
|
当选择曲面时,要注意以下信息:
•可以选择能任意修剪的曲面,例如,包括内孔和延伸深度变化。
•可以选择具有不同拉伸深度的曲面。
•如果在选择弯曲曲面之前选择了“自动选择”(Autoselect) 复选框,将包括与选定曲面相邻的任何曲面。这些曲面可能是不连续的,所以一定要对其进行检查,以确定是否需要平滑几何。“自动选择”(Autoselect) 选项不能用于曲线或平面。
•如果凸轮主体上有明显的或不连续的曲面过渡,请在创建凸轮从动机构连接之前应修改几何形状,以避免性能不佳。例如,可在尖角处创建一个小的倒圆角特征。
•凸轮与另一凸轮相互作用的一侧由凸轮的法线方向指示。如果选择开放的曲线或曲面,会出现一个洋红色的箭头,从相互作用的侧开始延伸,指示凸轮的法向。如果要将凸轮的作用侧改为凸轮的背面,请在“凸轮从动机构连接定义”(Cam-Follower Connection Definition) 对话框中,单击“反向”(Flip)。切记,对凸轮作用侧的更改必须满足模型的几何和装配约束。
•可选择平面曲面,但对于平面,必须同时为凸轮的延伸方向指定其它参考。要明确地指定凸轮方向,请在“凸轮从动机构连接定义”(Cam-Follower Connection Definition) 对话框中,单击“前参考”(Front reference) 和“后参考”(Back reference)。
•要更改现有凸轮上的凸轮曲面定义,请从“机构树”中选择该凸轮,右键单击,然后从快捷菜单中选取“编辑定义”(Edit Definition)。“凸轮从动机构连接定义”(Cam-Follower Connection Definition) 对话框打开。可从任一凸轮中选择并移除曲面或曲线,方法是在选择曲面或曲线的同时按住 CTRL 键,也可“反向”(Flip) 曲面法向。
关于用于凸轮从动机构连接的曲线:
可以在一个刚性主体上为生成凸轮选择一条平面基准曲线或边。假定由曲线生成的凸轮的延伸方向会沿着垂直于该曲线所在平面的方向无限延伸。
如果选择了直曲线或顶点,则系统会提示您选择同一刚性主体上的点、顶点、平面实体曲面或基准平面以定义凸轮的工作面。选定的点不能在选定的线上。凸轮法线将被放置在工作面中,并会垂直于工作面创建凸轮的深度。凸轮法向决定凸轮的作用侧,凸轮将在此处相互作用,除非由于装配约束而不允许相互作用。
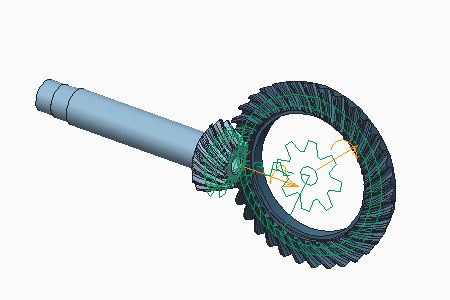
下一个示例显示用作凸轮的基准曲线。在选择直边或基准曲线后,还必须选择一个平面或点来指定工作面。工作面中会出现一个洋红色箭头,指示凸轮法向。凸轮的延伸方向将在垂直于工作面的平面上无限延伸。
PS:可只为两个凸轮中的一个选择直线或边。
1.Cam1
2.凸轮 1 法线
3.Cam2
4.凸轮 2 法线
5.工作平面
6.凸轮 2 延伸平面
关于用于凸轮从动机构连接的深度参考:
切记,程序认为您创建的凸轮在拉伸方向上的深度为无穷大。如果选择凸轮的弯曲曲面,则将以适当的深度显示它。
如果为其中一个凸轮选择平面,必须使用“凸轮从动机构连接定义”(Cam-Follower Connection Definition) 对话框中“深度显示设置”(Depth display settings) 部分的参考定义凸轮方向。如果为凸轮选择一条直边或直线,必须选择一个点、顶点、平面或基准平面以定义工作面,并可使用深度参考来更改凸轮的直观显示。
选择下列参考方法之一,并按所述指定“前参考”(Front reference)、“后参考”(Back reference)、“中心参考”(Center reference) 以及“深度”(Depth)。
•“自动”(Automatic) - 根据选定的凸轮曲面,自动计算相应的凸轮深度。如果选择平整平面表面作为参考,则此选项不可用。
•“前面和后面”(Front & Back) - 单击“前参考”(Front reference) 和“后参考”(Back reference) 旁的选择器箭头,然后选择两个点或顶点用作深度参考。这些参考也能定向凸轮。将被自动计算的凸轮深度等于所选参考之间的距离。
•“前面、后面和深度”(Front, Back, & Depth) - 单击“前参考”(Front reference) 和“后参考”(Back reference) 旁的选择器箭头,然后选择两个点或顶点用作深度参考。输入“深度”(Depth) 值。
•“中心和深度”(Center & Depth) - 单击“中心参考”(Center reference) 旁的选择器箭头,然后选择一个点或顶点。输入“深度”(Depth) 值。
编辑凸轮从动机构连接:
1.从模型树中选择要编辑的凸轮从动机构,右键单击,然后从快捷菜单中选取编辑定义。“凸轮从动机构连接定义”(Cam-Follower Connection Definition) 对话框打开。
2.此时,即可向两个凸轮中添加曲面或从中移除曲面。
在拖动操作中使用凸轮从动机构连接
在 Mechanism Design 或“设计动画”拖动操作中使用凸轮从动机构时,请切记以下要点:
•可拖动从动机构连接中的任意一个凸轮主体。
•可保持两个凸轮间的连接和相切,或允许其分离和碰撞。
•可启用或禁用凸轮从动机构连接,但不能锁定它。不过,可锁定用于定义凸轮的刚性主体。
删除凸轮从动机构连接:
1.单击 。“凸轮从动机构连接定义”(Cam-Follower Connection Definition) 对话框打开。
2.从列表中选择一个现有的凸轮从动机构连接。
3.单击“移除”(Remove)。
关于通用齿轮副:
通用齿轮副是一种可在任何运动轴组合上创建的齿轮:
•两个旋转轴
•一个旋转轴和一个平移轴
•两个平移轴
PS:
•所有继承齿轮均显示为通用。
•要创建其它 (动态) 类型的齿轮副,必须具有 Mechanism Dynamics 许可证。
创建通用齿轮副定义两个运动轴之间的运动关系。齿轮副中的每个齿轮都需要有两个刚性主体和一个运动轴连接。通用齿轮副连接可约束两个运动轴的速度,但是不能约束由轴连接的刚性主体的相对空间方位。出于以下目的使用“拖动”(Drag) 对话框:
•更改齿轮副中刚性主体的方向,以满足机构中的其它物理约束
•要指定伺服电动机配置文件
•要配置齿轮副中齿轮主体的开始方向
由于通用齿轮副被视为速度约束,而且并非基于模型几何,因此可直接指定传动比,并且可更改节圆直径值。齿轮副工作时,齿轮副中两个运动刚性主体的表面无需接触。更改传动比时无需创建新的几何。
PS:Mechanism Design 中的齿轮副可以在“设计动画”中使用。可使用它们创建两个齿轮主体的相对速度的动画,并可在动画期间禁用齿轮副连接。
关于动态齿轮副:
创建齿轮副时无需 Mechanism Dynamics 许可证。当具有 Mechanism Dynamics 许可证时,齿轮副的动态属性只能用于动态分析。
机构中如果有动态齿轮副,则可能会影响涉及到质量的分析 (包括动态分析、力平衡分析或静态分析) 的分析结果。
可以为所有动态齿轮类型定义齿轮制造角,例如压力角和螺旋角。在扭矩从一个齿轮传递到另一个齿轮时,这些角会影响齿轮间的反作用载荷的方向。也可创建测量,以捕获动态齿轮副中的反作用载荷的特定分量。
Mechanism Design 和 Mechanism Dynamics 中的齿轮副均可在“设计动画”中使用。可创建动画来显示两个齿轮主体的相对速度,或者在动画期间禁用齿轮副连接。
动态齿轮副的类型:
齿轮副的每种类型都通过其运动轴定义,如下表中所示。
每种齿轮副类型均由其运动轴定义。
•正 - 两个相互绕卷且节圆直径相交的圆柱。根据转换扭矩、齿轮直径和制造角度计算齿轮间的反作用力。正齿轮具有螺旋角,也称为螺旋正齿轮。
•斜坡口 - 两个相互绕卷且节圆直径相交的圆锥。根据转换扭矩、齿轮直径和制造角度计算齿轮间的反作用力。锥齿轮具有螺旋角,也称为螺旋锥齿轮。当轴平行时,锥齿轮即为正齿轮。
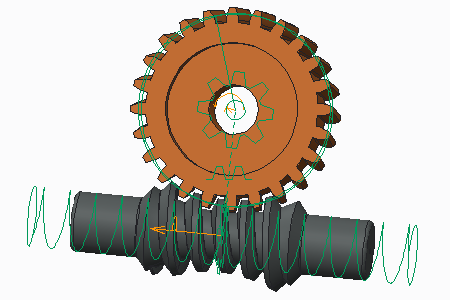
•蜗轮 - 两个尺寸不同的齿轮,其蜗轮主体更小,而轴比轮盘主体长。蜗轮齿轮定义为相互滑动且节圆直径相交的圆柱。需要较大减缩比时使用。
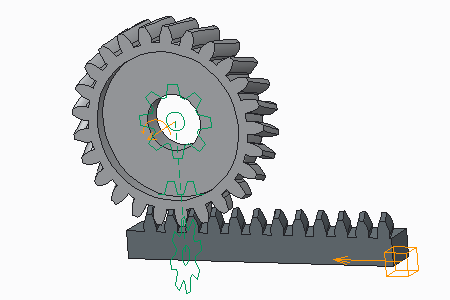
•“齿条与小齿轮”(Rack and Pinion) - 将旋转运动转换为平移运动,也可以将平移运动转换为旋转运动。齿条和小齿轮副定义为在齿条的节曲面上绕卷的圆柱。基于已转换的扭矩、齿轮的间隙以及制造角计算齿轮间的反作用力。
创建通用齿轮副:
1.单击 “齿轮”(Gears)。“齿轮副定义”(Gear Pairs Definition) 对话框打开。
2.在“类型”(Type) 下,选择“类属”(Generic)。
3.在“齿轮 1”(Gear1) 选项卡上,单击 并选择旋转或平移运动轴。
4.接头连接中的第一刚性主体被指定为“托架”(Carrier),第二刚性主体被指定为“齿轮”(Gear)。单击  可切换刚性主体定义。可通过单击“连接”(Connections) 文件夹中的“齿轮”(Gears),然后单击齿轮名称旁边的箭头来查看与“机构树”中给定齿轮相关联的刚性主体顺序。
可切换刚性主体定义。可通过单击“连接”(Connections) 文件夹中的“齿轮”(Gears),然后单击齿轮名称旁边的箭头来查看与“机构树”中给定齿轮相关联的刚性主体顺序。
5.如果选择旋转轴,则输入节圆直径的值。显示直径为输入直径的圆。该圆以选定运动轴为中心。从圆心到圆周的一条直线指示运动轴的零参考点。
6.在“图标位置”(Icon Location) 下,单击 并为节圆的偏移选择点、顶点、基准平面或与轴垂直的曲面。
7.按步骤 3-6 所述,在“齿轮 2”(Gear2) 选项卡中填写其它信息。
8.在“属性”(Properties) 选项卡中,从下拉列表中选择“传动比”(Gear Ratio)。
◦如果选择“节圆直径”(Pitch circle diameter),则将在“齿轮 1”(Gear1) 和“齿轮 2”(Gear2) 选项卡中显示输入的节圆直径值。
◦如果选择“用户定义”(User Defined),并且在“齿轮 1”(Gear1) 和“齿轮 2”(Gear2) 选项卡上输入节圆直径的实数值,则节圆的大小不会更改。
创建正齿轮副:
1.单击 “齿轮”(Gears)。“齿轮副定义”(Gear Pairs Definition) 对话框打开。
2.在“类型”(Type) 下,选择“正”(Spur)。
3.在“齿轮 1”(Gear1) 选项卡中输入以下信息:
◦选择一个旋转运动轴。接头上会出现一个洋红色箭头,指示该轴的正方向。请使用右手定则确定旋转方向。
选项卡的“刚性主体”(Rigid Bodies) 区域中显示通过接头连接的刚性主体的名称。默认情况下,所连接的第一个刚性主体称为“齿轮”(Gear),第二个刚性主体称为“托架”(Carrier)。要反转刚性主体的顺序,请单击 。可通过单击“连接”(Connections) 文件夹中的“齿轮”(Gears),然后单击齿轮名称旁边的箭头来查看与“机构树”中给定齿轮相关联的刚性主体顺序。
◦在“节圆”(Pitch Circle) 下的“直径”(Diameter) 框内键入节圆直径值。
◦在“图标位置”(Icon location) 旁,单击 并为节圆图标的位置选择点、顶点、基准平面或与轴垂直的曲面。默认位置是“齿轮 1”(Gear1) 接头的根部。
4.在“齿轮 2”(Gear2) 选项卡中输入以下信息:
◦选择与“齿轮1”(Gear1) 轴平行的旋转运动轴。出现一个着色箭头,指示正方向。要反转方向,请单击 。选项卡的“刚性主体”(Rigid Bodies) 区域中显示通过接头连接的刚性主体的名称。默认情况下,所连接的第一个刚性主体称为“齿轮”(Gear),第二个刚性主体称为“托架”(Carrier)。要反转刚性主体的顺序,请单击 。
PS:默认情况下,轴的方向相同时,会创建一个行星齿轮副。在这种情况下,第一个齿轮应为外部齿轮,第二个齿轮应为内部齿轮。
◦会自动计算出“齿轮 2”(Gear2) 的螺距直径,以便与“齿轮 1”(Gear1) 的螺距直径相连接。可自动计算出“齿轮2”(Gear2) 的节圆位置,使其与“齿轮1”(Gear1) 节圆位置的位置相匹配。
按 ENTER 键会显示两个以选定运动轴为中心的圆。这两个圆通过表示螺旋线角度的较小的段连接。从圆心到圆周的直线显示了运动轴的零参考点。
根据轴的方向,合成齿轮可以是内部齿轮或外部齿轮。
5.在“属性”(Properties) 选项卡中,从列表中选取“传动比”(Gear Ratio) 类型。如果选择“节圆直径”(Pitch circle diameter) (默认),则仍可在“齿轮 1”(Gear1) 选项卡上编辑“齿轮 1”(Gear1) 的节圆直径值。如果选择“用户定义”(User Defined),请导入实数值作为相对节圆直径或在“传动比”(Gear Ratio) 中为“齿轮 1”(Gear1) 和“齿轮 2”(Gear2) 导入齿轮轮齿编号。可自动计算两个选项卡上的节圆直径。
6.输入“压力角”(Pressure Angle) 的值 (默认值 = 20°) 以及齿轮连接的“螺旋角”(Helix Angle)。将螺旋角应用于“齿轮 1”,则会自动设置“齿轮 2”上相应的螺旋角以使其与“齿轮 1”上的螺旋角相匹配。
PS:螺旋角为正表示为右手螺旋。
创建锥齿轮副:
1.单击 “齿轮”(Gears)。“齿轮副定义”(Gear Pairs Definition) 对话框打开。
2.在“类型”(Type) 下,选择“锥”(Bevel)。
3.在“齿轮 1”(Gear1) 选项卡中输入以下信息:
◦选择一个旋转运动轴。接头上会出现一个洋红色箭头,指示该轴的正方向。请使用右手定则确定旋转方向。
选项卡的“刚性主体”(Rigid Bodies) 区域中显示通过接头连接的刚性主体的名称。默认情况下,所连接的第一个刚性主体称为“齿轮”(Gear),第二个刚性主体称为“托架”(Carrier)。要反转刚性主体的顺序,请单击 。可通过单击“连接”(Connections) 文件夹中的“齿轮”(Gears),然后单击齿轮名称旁边的箭头来查看与“机构树”中给定齿轮相关联的刚性主体顺序。
◦在“节圆”(Pitch Circle) 下的“直径”(Diameter) 框内键入节圆直径值。
◦在“图标位置”(Icon location) 旁,单击 并为节圆图标的位置选择点、顶点、基准平面或与轴垂直的曲面。默认位置是“齿轮 1”(Gear1) 接头的根部。
4.在“齿轮 2”(Gear2) 选项卡中输入以下信息:
◦选择与“齿轮 1”(Gear1) 轴相交或平行的旋转运动轴。出现一个着色箭头,指示旋转的正方向。要反转方向,请单击 。
选项卡的“刚性主体”(Rigid Bodies) 区域中显示通过接头连接的刚性主体的名称。默认情况下,所连接的第一个刚性主体称为“齿轮”(Gear),第二个刚性主体称为“托架”(Carrier)。要反转刚性主体的顺序,请单击 。
◦会自动计算出“齿轮 2”(Gear2) 的螺距直径,以便与“齿轮 1”(Gear1) 的螺距直径相连接。可自动计算出“齿轮 2”(Gear2) 的节圆位置,使其与“齿轮 1”(Gear1) 节圆位置的位置相匹配。
按 ENTER 键会显示每个齿轮的节圆锥。节圆锥会显示为两个以选定运动轴为中心,并具有进行了圆锥调整的直径的圆。这两个圆通过表示螺旋线角度的较小的段连接。从圆心到圆周的直线显示了运动轴的零参考点。
PS:您不能创建行星齿轮。
5.在“属性”(Properties) 选项卡中,从列表中选取“传动比”(Gear Ratio) 类型。如果选择“节圆直径”(Pitch circle diameter) (默认),则仍然可以编辑“齿轮 1”(Gear1) 选项卡上的“齿轮 1”(Gear1) 节圆直径的值。如果选择“用户定义”(User Defined),请导入实数值作为相对节圆直径或在“传动比”(Gear Ratio) 中为“齿轮 1”(Gear1) 和“齿轮 2”(Gear2) 导入齿轮轮齿编号。可自动计算两个选项卡上的节圆直径。
6.输入“压力角”(Pressure angle) 的值 (默认值 = 20°) 以及齿轮连接的“螺旋角”(Helix Angle)。将螺旋角应用于“齿轮 1”,则会自动设置“齿轮 2”上相应的螺旋角以使其与“齿轮 1”上的螺旋角相匹配。计算出斜角的方向和模,并将其显示为每个齿轮轴与节圆锥切线间的角度。
PS:螺旋角为正表示为右手螺旋。
创建蜗轮副:
1.单击 “齿轮”(Gears)。“齿轮副定义”(Gear Pairs Definition) 对话框打开。
2.在“类型”(Type) 下,选择“蜗轮”(Worm)。
3.在“蜗轮”(Worm) 选项卡中输入以下信息:
◦选择一个旋转运动轴。接头上会出现一个洋红色箭头,指示该轴的正方向。请使用右手定则确定旋转方向。
选项卡的“刚性主体”(Rigid Bodies) 区域中显示通过接头连接的刚性主体的名称。默认情况下,所连接的第一个刚性主体称为“齿轮”(Gear),第二个刚性主体称为“托架”(Carrier)。要反转刚性主体的顺序,请单击 。可通过单击“连接”(Connections) 文件夹中的“齿轮”(Gears),然后单击齿轮名称旁边的箭头来查看与“机构树”中给定齿轮相关联的刚性主体顺序。
◦在“节圆”(Pitch Circle) 下的“直径”(Diameter) 框内键入节圆直径值。
◦在“图标位置”(Icon location) 旁,单击 并为节圆图标的位置选择点、顶点、基准平面或与轴垂直的曲面。默认位置是“齿轮 1”(Gear1) 接头的根部。
4.在“轮盘”(Wheel) 选项卡中输入以下信息:
◦选择与“蜗轮”(Worm) 轴垂直但不相交的旋转运动轴,即,另一平面中的轴。出现一个着色箭头,指示旋转的正方向。要反转方向,请单击 。
选项卡的“刚性主体”(Rigid Bodies) 区域中显示通过接头连接的刚性主体的名称。默认情况下,所连接的第一个刚性主体称为“齿轮”(Gear),第二个刚性主体称为“托架”(Carrier)。要反转刚性主体的顺序,请单击 。
◦自动计算轮盘的节圆直径,以与“蜗轮”(Worm) 上的节圆直径相连接。自动计算节圆位置 (穿过“蜗轮”(Worm) 轴并垂直于“轮盘”(Wheel) 轴)。
按 ENTER 键后,将显示代表节圆直径和螺旋角的螺旋。两个带有计算直径的圆将显示在轮盘上,并位于轮盘上节圆位置的中心。这两个圆通过表示螺旋线角度的较小的段连接。从圆心到圆周的直线显示了运动轴的零参考点。
5.在“属性”(Properties) 选项卡中,从列表中选取“传动比”(Gear Ratio) 类型。如果选择“节圆直径”(Pitch circle diameter) (默认),则仍然可以编辑“蜗轮”(Worm) 选项卡上的蜗轮节圆直径的值。如果选择“用户定义”(User Defined),请在“传动比”(Gear Ratio) 下输入数值作为蜗轮螺旋数和轮盘刀齿数。将显示净传动比,并自动计算螺旋角。
6.输入“压力角”(Pressure angle) 的值 (默认值 = 20°) 以及涡轮连接的“螺旋角”(Screw Angle) 值。螺旋角应用于蜗轮齿轮,而轮盘上相应的螺旋角会自动进行设置,以与蜗轮上的螺旋角相匹配。如果选择“用户定义”(User Defined) 传动比,则将自动计算螺旋角。
PS:螺旋角为正表示为右手螺旋。
创建齿条和小齿轮副:
1.单击 “齿轮”(Gears)。“齿轮副定义”(Gear Pairs Definition) 对话框打开。
2.在“类型”(Type) 下,选择“齿条和小齿轮”(Rack and pinion)。
3.在“小齿轮”(Pinion) 选项卡中输入以下信息:
◦选择一个旋转运动轴。接头上会出现一个洋红色箭头,指示该轴的正方向。请使用右手定则确定旋转方向。
选项卡的“刚性主体”(Rigid Bodies) 区域中显示通过接头连接的刚性主体的名称。默认情况下,所连接的第一个刚性主体称为“齿轮”(Gear),第二个刚性主体称为“托架”(Carrier)。要反转刚性主体的顺序,请单击 。可通过单击“连接”(Connections) 文件夹中的“齿轮”(Gears),然后单击齿轮名称旁边的箭头来查看与“机构树”中给定齿轮相关联的刚性主体顺序。
◦在“节圆”(Pitch Circle) 下的“直径”(Diameter) 框内键入节圆直径值。
◦在“图标位置”(Icon location) 旁,单击 并为节圆图标的位置选择点、顶点、基准平面或与轴垂直的曲面。默认位置是“小齿轮”(Pinion) 接头的根部。
4.在“齿条”(Rack) 选项卡中输入以下信息:
◦选择一个平移运动轴。出现一个着色箭头,指示平移的正方向。此平移运动轴必须垂直于齿条轴。要反转方向,请单击 。
选项卡的“刚性主体”(Rigid Bodies) 区域中显示通过接头连接的刚性主体的名称。默认情况下,所连接的第一个刚性主体称为“齿条”(Rack),第二个刚性主体称为“托架”(Carrier)。要反转刚性主体的顺序,请单击 。
◦齿条节平面在齿条轴方向上自动与小齿轮节圆相切。
按下 ENTER 键时,两个直径大小为节圆直径的圆将显示在小齿轮上,并且位于选定运动轴的居中位置。这两个圆通过表示齿条和小齿轮副的螺旋角的较小段来连接。从小齿轮中心到圆周的一条直线指示运动轴的零参考点。齿条节平面显示为矩形,且与节圆相切,其宽度与节圆半径相等,长度为齿条能够移动的距离。
5.在“属性”(Properties) 选项卡上,单击“齿条比”(Rack Ratio) 以定义节圆直径的大小。如果选择“节圆直径”(Pitch circle diameter) (默认设置),则节圆直径将显示在“小齿轮”(Pinion) 选项卡上。选择“用户定义”(User Defined) 并输入一个实数作为齿条比,以设置小齿轮每转一圈齿条将移动的距离。小齿轮节圆的直径将自动计算出来,而相应的齿条节平面将被调整。
6.输入“压力角”(Pressure angle) 的值 (默认值 = 20°) 以及齿轮副的“螺旋角”(Helix Angle)。螺旋角是针对小齿轮设置的并自动用于定义齿条上的相应斜角。
PS:螺旋角为正表示为右手螺旋。
定义齿轮副的方位:
使用该过程可调整先前创建齿轮副中各刚性主体的相对空间方位。
1.单击 “拖动元件”(Drag Components)。打开“拖动”(Drag) 对话框。
2.打开“快照”(Snapshot) 列表。在“约束”(Constraints) 选项卡中,单击  。选择要禁用的齿轮连接图标。该约束会出现在列表中。
。选择要禁用的齿轮连接图标。该约束会出现在列表中。
3.单击  并将齿轮副中的刚性主体拖动到所需配置。
并将齿轮副中的刚性主体拖动到所需配置。
4.再次单击 重新连接齿轮副。要删除约束,将其突出显示并单击  。
。
5.单击  拍取快照。快照将被添加到“快照”(Snapshots) 选项卡下的列表中。
拍取快照。快照将被添加到“快照”(Snapshots) 选项卡下的列表中。
6.如果运行运动分析、位置分析、力平衡分析或静态分析,请为“初始配置”(Initial Configuration) 选择快照。
7.如果运行动态分析,请使用快照为分析定义“初始条件 (Initial Condition)”。
还可使用“运动轴设置”(Motion Axis Settings) 对话框来重新定义运动轴零位置。
机构动力学分析中使用齿轮副:
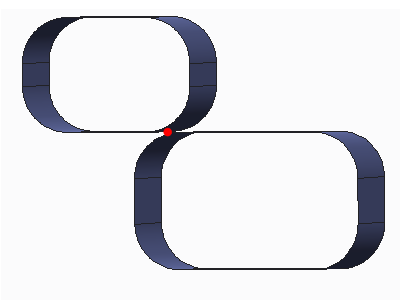
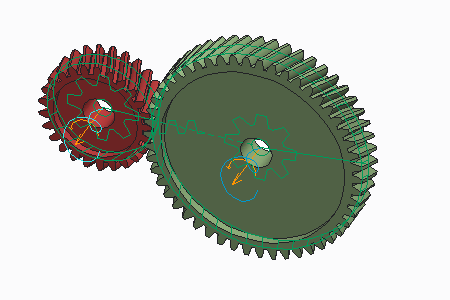
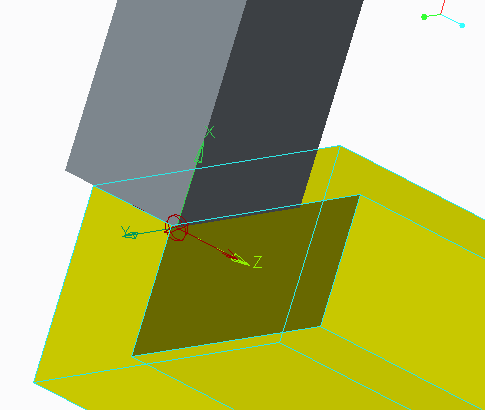
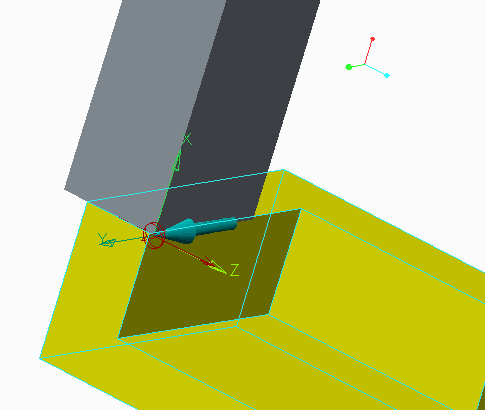
机构中如果有齿轮副,则可能会影响涉及到质量的分析的分析结果。齿轮副中的每个齿轮均包含两个刚性主体,一个称为齿轮、齿条或小齿轮,另一个称为托架,两者通过运动轴连接。要确保齿轮副中的几何在分析期间保持预期的空间方位,一种方法是两个齿轮都使用同一个刚性主体作为托架主体。这个主体可以是基础主体,也可以是机构中的其它刚性主体。下图所示为一个简单的标准齿轮副,其中用于托架主体 (红色块) 的两个零件都属于同一个刚性主体。
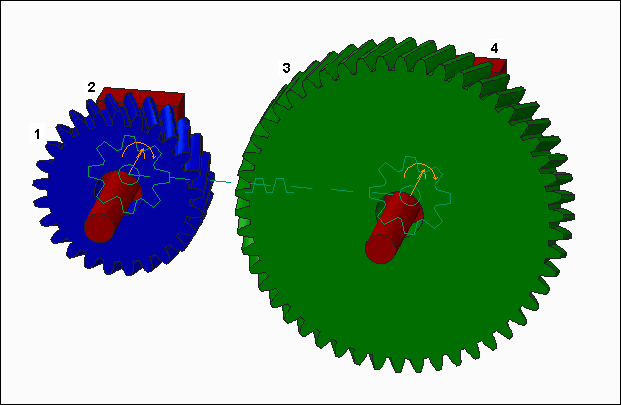
1.齿轮 1
2.托架 1
3.齿轮 2
4.托架 2
如果所创建的齿轮副中,两个齿轮不使用公共的托架主体,则可能会影响动态、力平衡或静态分析的结果。对于没有公共托架主体的齿轮副,软件将创建一个不可见的内部主体。在装配中,该刚性主体的质量被分配为 0.001 (最小刚性主体的质量)。运行动态、力平衡或静态分析时,可能会出现一条消息,说明某个齿轮副连接没有公共托架主体。使用不可见的内部主体的质量可能会对分析结果造成不良影响。在这种情况下,请停止分析并重新设计机构,使得齿轮副包括公共托架主体。否则,可继续使用不可见的内部主体进行分析。
定义电动机:
可使用“电动机”(Motor) 选项卡来定义伺服电动机、执行电动机或力扭矩。
可以使用“电动机”(Motor) 选项卡中的命令、收集器和列表来定义电动机。下列步骤使用“参考”(References) 和“轮廓详细信息”(Profile Details) 选项卡设置电动机的参考和特征。
1.要创建“伺服”电动机,请在“机构”(Mechanism) 选项卡中,单击 “伺服电动机”(Servo Motors)。“电动机”(Motor) 选项卡随即打开。
2.要创建“执行”电动机,请在“机构”(Mechanism) 选项卡中,单击 “执行电动机”(Force Motors)。“电动机”(Motor) 选项卡随即打开。
PS:如果您拥有 Mechanism Dynamics 许可证,则可在伺服、执行电动机、力或扭矩之间进行切换。请记住,伺服电动机和执行电动机具有不同的参考收集规则。
3.为电动机选择参考。
4.要设置电动机驱动的实际数量,请从“驱动数量”(Driven Quantity) 列表中选取一个选项,或使用“轮廓详细信息”(Profile Details) 选项卡中的驱动数量。
5.要定义电动机的轮廓函数,请使用“配置文件详情”(Profile Details) 选项卡中的电动机函数选项。
6.查看以图形表示的电动机轮廓。
7.单击确定 。
选择参考
1.默认打开“参考”(References) 选项卡。
2.为伺服电动机选择参考,在大多数情况下选取的参考类型将用于设置运动类型。选取下列参考类型之一:
◦选择一个运动轴。根据选定的运动轴,可以创建 “平移”(Translational)、“旋转”(Rotational) 或 “槽”(Slot) 电动机。
a.要编辑运动轴设置,请单击 。
b.“运动类型”(Motion Type) 取决于选定的“从动图元”(Driven Entity) 参考。
c.要反向运动方向,请单击“反向”(Flip) 或“参考”(References)下的 。
◦为伺服电动机选择 2 参考。根据选定的参考,可以创建平移或旋转电动机。
PS:如果选择点或平面之类的参考定义伺服电动机,则创建的是几何伺服电动机。
a.选择一个点或平面作为“从动图元”(Driven Entity)。
b.选择一个点或平面作为“参考图元”(Reference Entity)。
c.在大多数情况下,“运动类型”(Motion Type) 将通过选定的“从动图元”(Driven Entity) 参考自动确定。要更改“运动类型”(Motion Type),请选择其他选项。仅适用的选项可用。
d.如果适用,请为“运动方向”(Motion Direction) 选择基于直线的曲线、边或轴参考。也可以选择平面作为运动方向,该平面的法向用于定义方向。将出现一个箭头来显示运动方向。
e.要反向运动方向,请单击“反向”(Flip) 或“参考”(References)下的 。
◦为执行电动机、力或扭矩选择参考
▪运动轴执行电动机和点对点力以单个自由度施加力 (沿平移、旋转,或槽轴)。定义此类执行电动机或力时,只能选择从动图元参考。
▪单点力和扭矩可在指定方向施加运动。定义此类执行电动机、力或扭矩时,请设置“运动方向”(Motion Direction) 选项。
a.从下列选项中选择运动方向的类型:
▪“显式矢量”(Explicit Vector) - 为矢量选择“参考系”(Reference Frame)。将此框留空以使用全局坐标系。输入显式 X、Y 和 Z 值。
▪“直线或平面法线”(Straight Line or Plane Normal) - 选择运动参考。单击“反向”(Flip) 以反转力或扭矩的方向。
▪“点对点”(Point-to-Point) - 选择两个点以指定方向。
b.从“方向相对于”(Direction Relative to) 区域中,选择“基础”(Ground) 或“从动刚性主体”(Driven Rigid Body)。
设置驱动数量
1.使用“配置文件”(Profile) 组中的选项,或单击“配置文件详情”(Profile Details) 以打开该选项卡。
2.从列表中选择“驱动数量”(Driven Quantity)。默认值为“位置”(Position)。
◦“位置”(Position) - 根据选定图元的位置定义伺服电动机运动。
◦“速度”(Velocity) - 根据伺服电动机的速度对其运动进行定义。默认情况下,当开始运动时,将使用伺服电动机的当前位置。
a.要设置其他起点,请清除“使用当前位置作为初始值”(Use Current Position as Initial) 复选框。
b.从“初始位置”(Initial Position) 列表选择一个值,或在框中键入一个值。
c.要查看新的初始位置,请单击 。该位置将在图形窗口中进行更新。
d.要更改单位,请从列表中选择一个选项。
◦“加速度”(Acceleration) - 根据伺服电动机的加速度对其运动进行定义。默认情况下,当开始运动时,将使用伺服电动机的当前位置。
a.要设置其他起点,请清除“使用当前位置作为初始值”(Use Current Position as Initial) 复选框。
b.从“初始位置”(Initial Position) 列表选择一个值,或在框中键入一个值。
c.要查看新的初始位置,请单击 。该位置将在图形窗口中进行更新。
d.要设置“初始速度”(Initial Velocity),请从列表选择一个值,或在框中键入一个值。
e.要更改初始位置或初始速度单位,请从适用列表选择一个选项。
◦“力”(Force) - 定义执行电动机,力或扭矩。执行电动机可驱动运动轴、单个基准点或顶点、一对基准点/顶点,或整个刚性主体。
设置电动机函数
1.单击“配置文件详情”(Profile Details) 以打开该选项卡并选择驱动数量。
2.要定义电动机的运动,请从列表选择“函数类型”(Function Type)。
|
函数类型
|
说明
|
系数
|
|---|---|---|
|
恒定
|
创建常数轮廓。
|
q = A
其中
A = 常数
|
|
线性
|
创建随时间呈线性变化的轮廓。
|
q = A + B*x
其中
A = 常数
B = 斜率
|
|
余弦
|
为电动机轮廓分配余弦波值。
|
q = A*cos(360*x/T + B) + C
其中
A = 幅值
B = 相位
C = 偏移量
T = 周期
|
|
正弦-常数-余弦-加速度 (SCCA)
|
模拟凸轮轮廓输出。此选项仅适用于加速度电动机。
|
有关详细信息,请参阅关于 SCCA 电动机函数的设置。
|
|
摆线
|
模拟凸轮轮廓输出。
|
q = L*x /T – L*sin(360*x/T)/(2*pi)
其中
L = 总高度
T = 周期
|
|
抛物线
|
模拟电动机的轨迹。
|
q = A*x + 1/2 B(x2)
其中
A = 线性系数
B = 二次项系数
|
|
多项式
|
定义三次多项式电动机轮廓。
|
q = A + B*x + C*x2 + D*x3
其中
A = 常数项
B = 线性项系数
C = 二次项系数
D = 三次项系数
|
|
表
|
使用四列表格中的值生成电动机运动。可以使用输出测量结果表。
|
有关详细信息,请参阅定义表电动机函数。
|
|
用户定义
|
指定由多个表达式段定义的任何一种复杂轮廓。
|
有关详细信息,请参阅要定义用户定义电动机函数。
|
|
自定义载荷
|
向模型施加一系列外部定义的复合载荷。该选项仅用于执行电动机定义。
|
有关详细信息,请参阅关于自定义载荷。
|
3.对于执行电动机,请设置“主变量”(Primary Variable),即以 x 表示的采用函数定义的模的变量。您可以选择 t (时间) 或列表中可用的任何测量。
4.设置选定类型的电动机函数的系数 (如果适用)。
设置图形显示
使用“图形”(Graph) 部分在“图表工具”(Chart-Tool) 窗口中显示电动机轮廓。
1.要在单独的窗口中显示每个图形,请单击以选中“在单独图形中”(In separate graphs) 复选框。
2.单击或清除复选框以应用或移除不同的图形显示设置。
3.定义表轮廓时,可以修改与显示和插值点数有关的设置。
4.单击  打开“图表工具”(Chart-Tool) 窗口。
打开“图表工具”(Chart-Tool) 窗口。
5.要更改图形显示,请将“图表工具”(Chart-Tool) 对话框保持打开状态,然后重新定义电动机函数。图形将自动更新。出现所需的轮廓后,关闭“图表工具”(Chart-Tool) 对话框并接受电动机定义。
下图绘出了由电动机创建的不同类型的运动的电动机函数。用于生成电动机函数的公式值如下:
|
恒定
|
线性
|
余弦
|
摆线
|
SCCA
|
抛物线
|
多项式
|
|
A = 8
|
A = 18
|
A = 6
|
L = 12
|
0.4
|
A = 4
|
A = 7
|
|
B = -1.2
|
B = 40
|
T = 8
|
0.3
|
B = –0.6
|
B = –1.5
|
|
|
C = 3
|
5
|
C = 1
|
||||
|
T = 5
|
10
|
D = –0.1
|
更改属性
要更改电动机特征属性,请使用“属性”(Properties) 选项卡。
1.要编辑电动机特征名称,请在“名称”(Name) 框中键入新名称。
2.要在浏览器中显示电动机特征的相关信息,请单击  。
。
要编辑电动机:
1.右键单击“模型树”或“机构树”中的现有电动机,然后从快捷菜单中选取编辑定义 。
2.“电动机”(Motor) 选项卡随即打开。电动机图标及相应的参考图元在模型上被突出显示。电动机参考出现在相关收集器中。
3.可以使用功能区选项、“参考”(References) 选项卡以及“轮廓详细信息”(Profile Details) 选项卡来编辑伺服电动机的参考和值。
4.单击确定 。
定义表电动机函数:
使用以下步骤创建表电动机函数。您可以定义表,或者从文件中加载表。
1.在“轮廓详细信息”(Profile Details) 选项卡中,选择“表”(Table) 作为“函数类型”(Function Type)。
2.选择评估方法:
◦“线性”(Linear) - 以直线连接表点。如果轮廓存在不连续情况,则在选择“线性”(Linear) 绘制速度或加速度图形时,图形可能会不准确。
◦“样条”(Spline) - 将三次样条与每组点拟合。使用样条拟合可防止从动图元运动中的突变。
◦“单调”(Monotonic) - 使用默认速度值和单调模值时,生成单调轨迹。当定义一条包含多个单调模值段的轮廓时,所得轨迹将在这些段内单调。
表必须至少具有 2 行才能适用于电动机轮廓。
定义表
1.单击  向表中添加一新行。单击箭头或在框中键入非负值,以增加或减少一次添加到表的行数。
向表中添加一新行。单击箭头或在框中键入非负值,以增加或减少一次添加到表的行数。
2.单击  以根据需要删除表中突出显示的行。
以根据需要删除表中突出显示的行。
3.要对表进行排序,请单击 
4.在每一列中键入值:
◦“变量值”(Variable Value) - 在表的第一列中为自变量 X 键入值。如果当前定义的是力或力矩或者执行电动机,则此列为“时间”(Time) 或“测量”(Measure)。如果当前定义的是伺服电动机,则第一列中的值将为“时间”(Time) 值。
◦“驱动数量值”(Driven Quantity Value) - 在第二列中键入“驱动数量”(Driven Quantity) 值。
◦“导数值”(Derivative Value) 和“计算的导数值”(Computed Derivative Value) - 选取“单调拟合”(Monotonic fit) 时,将显示第三列和第四列。“计算的导数值”(Computed Derivative Value) 列中显示的值是当“导数值”(Derivative Value) 列未显示任何值时将采用的默认值。
5.要保存表数据并将其导出到文件,请遵循“与外部文件交互”(Interaction with External File) 部分中包含的以下步骤。
a.在框中键入名称,然后按 ENTER 键。
b.单击  。
。
6.要导入表文件中的数据,请执行以下操作之一︰
◦要选择表文件,请单击  。“选择表文件”(Select a Table File) 对话框随即打开。选择 *.tab 或 *.grt 文件,然后单击“打开”(Open)。文件名将显示在框中,表将显示在“表规范”(Table Specification) 框中。
。“选择表文件”(Select a Table File) 对话框随即打开。选择 *.tab 或 *.grt 文件,然后单击“打开”(Open)。文件名将显示在框中,表将显示在“表规范”(Table Specification) 框中。
◦键入之前保存的文件名或从之前保存的文件列表中选择文件,然后单击 。表将显示在“表规范”(Table Specification) 框中。
7.要使表格从属于外部文件,请单击以选中“取决于外部文件”(Depend on External File) 复选框。当表从属于外部文件时,将无法对其进行编辑。
定义用户定义的电动机函数:
定义电动机时,请使用此步骤在“轮廓详细信息”(Profile Details) 选项卡中指定“用户定义”(User Defined) 函数类型。
1.从“函数类型”(Function Type) 列表选择“用户定义”(User defined)。
2.单击 以添加行。
3.要编辑表达式,请选择它,然后单击  。打开“表达式定义”(Expression Definition) 对话框。
。打开“表达式定义”(Expression Definition) 对话框。
4.在“表达式定义”(Expression Definition) 对话框的文本框中输入一个表达式,或使用下列选项创建一个表达式:
◦单击  以打开“运算符”(Operators) 对话框,并为表达式选择算术运算符。
以打开“运算符”(Operators) 对话框,并为表达式选择算术运算符。
◦单击  以打开“常量”(Constants) 对话框,并为表达式选择常数或参数。
以打开“常量”(Constants) 对话框,并为表达式选择常数或参数。
◦单击  以打开“函数”(Functions) 对话框,并为表达式选择数学函数。
以打开“函数”(Functions) 对话框,并为表达式选择数学函数。
◦单击  以打开“变量”(Variables) 对话框,并为表达式选择先前定义的测量或变量。
以打开“变量”(Variables) 对话框,并为表达式选择先前定义的测量或变量。
◦单击 来检验表达式,并打开“表达式图形”(Expression Graph) 对话框。
PS:当您选择“运算符”(Operators)、“常量”(Constants)、“函数”(Functions) 或“变量”(Variables) 对话框中的任一项时,该项会在表达式输入区域中作为定义的一部分出现。
5.要指定表达式中主变量的范围,请指定一个“表达式域”(Expression Domain)。从列表中选择并输入一个数字作为开放边界,或从该列表中选择并输入一个数字作为封闭边界。
a.单击以选择“指定域”(Specify domain) 复选框。
b.在框中键入一个值或从先前值列表中进行选择,以设置排除或包括域的上限和下限。
c.选择表达式运算符 < 或 <=。
d.要使函数端保持开放,请仅为最后表达式段的域指定下限值。
当函数仅由一个表达式段组成时,域是任意的。为力/扭矩和执行电动机定义域指定的时间相对于分析开始时间计算。
6.单击“确定”(OK)。表达式和域值将显示在“轮廓详细信息”(Profile Details) 选项卡的“用户定义的轮廓规范”(User Defined Profile Specification) 区域中的“表达式”(Expression) 和“域”(Domain) 列中。
7.要更改“表达式”(Expression) 或“域”(Domain) 的值,可单击该值然后进行编辑。
8.要从表中移除一行或多行,可突出显示相应的行然后单击 。
定义用户定义的电动机函数:
定义电动机时,请使用此步骤在“轮廓详细信息”(Profile Details) 选项卡中指定“用户定义”(User Defined) 函数类型。
1.从“函数类型”(Function Type) 列表选择“用户定义”(User defined)。
2.单击 以添加行。
3.要编辑表达式,请选择它,然后单击 。打开“表达式定义”(Expression Definition) 对话框。
4.在“表达式定义”(Expression Definition) 对话框的文本框中输入一个表达式,或使用下列选项创建一个表达式:
◦单击 以打开“运算符”(Operators) 对话框,并为表达式选择算术运算符。
◦单击 以打开“常量”(Constants) 对话框,并为表达式选择常数或参数。
◦单击 以打开“函数”(Functions) 对话框,并为表达式选择数学函数。
◦单击 以打开“变量”(Variables) 对话框,并为表达式选择先前定义的测量或变量。
◦单击 来检验表达式,并打开“表达式图形”(Expression Graph) 对话框。
PS:当您选择“运算符”(Operators)、“常量”(Constants)、“函数”(Functions) 或“变量”(Variables) 对话框中的任一项时,该项会在表达式输入区域中作为定义的一部分出现。
5.要指定表达式中主变量的范围,请指定一个“表达式域”(Expression Domain)。从列表中选择并输入一个数字作为开放边界,或从该列表中选择并输入一个数字作为封闭边界。
a.单击以选择“指定域”(Specify domain) 复选框。
b.在框中键入一个值或从先前值列表中进行选择,以设置排除或包括域的上限和下限。
c.选择表达式运算符 < 或 <=。
d.要使函数端保持开放,请仅为最后表达式段的域指定下限值。
当函数仅由一个表达式段组成时,域是任意的。为力/扭矩和执行电动机定义域指定的时间相对于分析开始时间计算。
6.单击“确定”(OK)。表达式和域值将显示在“轮廓详细信息”(Profile Details) 选项卡的“用户定义的轮廓规范”(User Defined Profile Specification) 区域中的“表达式”(Expression) 和“域”(Domain) 列中。
7.要更改“表达式”(Expression) 或“域”(Domain) 的值,可单击该值然后进行编辑。
8.要从表中移除一行或多行,可突出显示相应的行然后单击 。
关于运算符对话框:
从“表达式定义”(Expression Definition) 对话框访问此对话框,或在“测量定义”(Measure Definition) 对话框中创建用户定义测量时访问。
在“表达式定义”(Expression Definition) 菜单栏上单击 |
运算符 |
定义 |
|---|---|
|
+ |
加号 |
|
– |
减号 |
|
* |
乘号 |
|
/ |
除号 |
|
^ |
取幂 |
|
( ) |
圆括号,分组 |
|
>1 |
大于 |
|
>=1 |
大于或等于 |
|
< 1 |
小于 |
|
<=1 |
小于或等于 |
|
==1 |
等于 |
|
!=1 |
不等于 |
|
&&1 |
布尔“与” |
|
||1 |
布尔“或” |
|
1 这些运算符对于伺服电动机不可用。 |
|
关于常数对话框:
从“表达式定义”(Expression Definition) 对话框访问此对话框,或在“测量定义”(Measure Definition) 对话框中创建用户定义测量时访问。使用此对话框来选择表中的常数或将参数添加到表达式中:
|
常数
|
值
|
|---|---|
|
pi
|
3.14159
|
|
e
|
2.71828
|
单击 ,将预定义参数添加为常数。打开“选择参数”(Select Parameter) 对话框,在只读表中列出可接受的参数。选择参数时,参数名称及其当前值会出现在列表中。使用参数时,切记以下内容:
•参数类型必须是整数或实数。
•参数名称必须只包含字母数字字符、下划线 (_) 或冒号 (:)。这些字符可以出现在任何语言中,其中包括亚洲语字符。
•参数名不可包括空格。
•参数名不能是保留字 e、pi 或 t 中的任何一个。
•可添加来自任意一级 - 顶层装配、子装配或元件的参数。
•常数值是分析开始时参数的值。该值在分析期间不更改。
•如果在将参数值包括进用户定义的函数中后对其进行更改,则执行电动机、伺服电动机或力/扭矩的轮廓中或者用户定义的测量表达式中的该值也会得到更新。
•如果在将参数包括进用户定义的表达式中后将其删除,则基于该表达式的测量、伺服电动机、执行电动机或力/扭矩都会变得不完整。
有关创建参数的详细信息,请在“帮助中心”中搜索参数。
单击 从表中移除先前作为常数添加的选定常数或参数。
关闭“常量”(Constants) 对话框后,参数名将作为表达式定义的一部分出现在“表达式定义”(Expression Definition) 或“测量定义”(Measure Definition) 对话框中。关于带和滑轮:
滑轮是一种在其周边有槽的轮盘。在带和滑轮系统中,缆或带沿着该槽运行,并将滑轮连接到下一个滑轮。使用滑轮与带系统传送旋转运动,或是增加或减小沿旋转运动轴的力矩 (如果滑轮有其它直径)。
创建带时,会定义原始带长度和带刚度常数 ( )。Mechanism Design 中的带是理想化的带,没有惯量属性。用来计算滑轮处因带拉伸而产生的力的公式如下:带拉伸力 = 刚度 X (当前带长度 - 原始带长度)/(原始带长度)。在连接带的滑轮处,会施加此计算中的带拉伸力。当计算得到的带拉伸力小于零时,则会分配零值。
)。Mechanism Design 中的带是理想化的带,没有惯量属性。用来计算滑轮处因带拉伸而产生的力的公式如下:带拉伸力 = 刚度 X (当前带长度 - 原始带长度)/(原始带长度)。在连接带的滑轮处,会施加此计算中的带拉伸力。当计算得到的带拉伸力小于零时,则会分配零值。
单击 打开“带”(Belt) 选项卡并创建一个带和滑轮系统。
在 Mechanism Design 中创建的带和滑轮系统是一种具有多个参数的装配特征。在“装配”和 Mechanism Design 中均可编辑带和滑轮系统。
关于带和滑轮用户界面:
“带”(Belt) 用户界面由选项卡、命令和快捷菜单组成。带和滑轮系统在“机构树”中用 标识。单击 “带”(Belts) 可打开“带”(Belt) 选项卡。
命令
•“未拉伸的长度”(Unstretched Length) - 设置未拉伸的带长度。
◦“用户定义”(User Defined) - 设置用户定义的未拉伸带长度。单击鼠标左键以在框中输入值,然后从列表中选取单位。
•“设置”(Settings) - 设置带刚度,以便计算滑轮上因带拉伸而产生的力。
◦“刚度 (E*A)”(Stiffness (E*A)) - 输入带的杨氏模量与截面面积的乘积。框中的值取决于从列表中选取的单位。
选项卡
•“参考”(References) - 显示滑轮放置参考和带平面。
•“选项”(Options) - 显示滑轮刚性主体定义和带包络的数目。
•“属性”(Properties) - 显示带和滑轮系统的名称。单击 可在浏览器中打开特征信息。
快捷菜单:
在“机构树”或图形窗口中右键单击某个带和滑轮系统可访问附加的特征专用命令:
•“带平面”(Belt Plane) - 选择一个平面曲面或基准平面以敷设带。
•“滑轮选择”(Pulley selections) - 选择用于敷设带的滑轮参考。
•“清除”(Clear) - 清除参考收集器。
创建带和滑轮系统:
1.机构装配打开时,单击 “带”(Belts)。“带”(Belt) 选项卡随即打开。
2.默认打开“参考”(References) 选项卡。选择要在其上包络带的曲面、边或连接。要同时选择两个参考,请按住 Ctrl 键。图形窗口中随即显示一个指示带路径的带。可以按如下方式更改路径:
◦单击 可切换带包绕滑轮时使用的侧。
◦单击向上或向下箭头来更改带路径中的滑轮顺序。
PS:单击相应的拖动控制滑块来反向包绕侧或更改包绕顺序。
3.设置路径后,可以为“带平面”(Belt Plane) 选择曲面。
PS:通常不必定义带平面,因为这是一个自动特征。但是,如果选定曲面不是用户需要的曲面,您可以手动选择另一个曲面。
4.单击“选项”(Options) 定义或编辑滑轮连接。默认情况下,如果无冲突,则滑轮的销钉或圆柱连接被定义为“滑轮主体”(Pulley Body),而第二主体将被定义为“托架主体”(Carrier Body)。
◦要反转滑轮主体和托架主体的角色,请单击 。请记住,这可能会导致不同滑轮间的刚性主体冲突。
◦输入一个值作为滑轮周围的“包络数”(Number of wraps)。默认值为 1。
◦单击“下一连接”(Next Connection),浏览并选择一组用于滑轮的销钉或圆柱连接。仅当滑轮参考为几何 (曲面、边或曲线) 且包含此参考的刚性主体有多个有效滑轮连接时,此选项才可用。
PS:单击相应的拖动控制滑块来设置包绕滑轮的包络数。
5.单击 “用户定义”(User Defined) 激活未拉伸带长度收集器。输入值,或从最近使用的值的列表中选择一个值。激活未拉伸带长度后,值会变为一种在连接过程中必须满足的约束。
6.在“刚度 (E*A)”(Stiffness (E*A)) 行中,从列表中选择刚度单位类型。框中的值取决于从列表中选取的刚度单位类型。
7.单击  预览新系统,然后单击确定 关闭。
预览新系统,然后单击确定 关闭。
关于测量结果:
测量有助于了解和分析移动机构所产生的结果,并可提供用来改进机构设计的信息。
只有在已经对机构运行了一个或多个分析并已保存和存储了分析结果集之后,才可以计算和查看测量结果。
可创建以下测量类型:
•可用“测量结果”(Measure Results) 对话框创建的位置、距离间隔、速度、加速度或凸轮测量。也可创建无需质量定义的系统及刚性主体测量。
•可用“测量结果”(Measure Results) 对话框创建的多种其他类型的动态测量 (要求具备 Mechanism Dynamics 许可证)。
•可用“分析定义”(Analysis Definition) 对话框创建的分析测量特征。距离和角度分析测量是用图形表示测量结果最有用的基准分析类型。
PS:有关在运行 Creo Behavioral Modeling 运动分析时创建分析测量或将测量用作参数的信息,请在“帮助中心”中进行搜索。
对于每种分析类型,下表列出了哪些测量可提供最有用的信息:
|
分析
|
测量
|
|---|---|
|
运动学
|
•位置、速度、加速度
•间隔
•Creo Parametric 特征
•自由度
•冗余
•时间
•刚性主体方向
•刚性主体角速度
•刚性主体角加速度
|
|
动态 (Dynamic)
|
除测力计外所有力
|
|
静态
|
•位置 (Position)
•连接反作用
•净载荷
•所有系统测量
•所有刚性主体测量
•Creo Parametric 特征
|
|
力平衡 (Force Balance)
|
•位置 (Position)
•连接反作用
•净载荷
•测力计
•所有系统测量
•所有刚性主体测量
•Creo Parametric 特征
|
|
位置 (Position)
|
•位置 (Position)
•间隔(距离)
•时间
•刚性主体角加速度
•Creo Parametric 特征
|
可绘制一个或多个 Mechanism Design 或 Mechanism Dynamics 分析的测量结果图形。可检索已保存的结果文件,也可将测量结果保存到表文件中或打印出来。
在运行分析前创建测量通常会更有效。运行分析后所创建的测量要求软件在创建图形之前对评估值进行计算。因此,与运行分析前创建的测量相比,这些测量在绘图时将花费更多的时间。有时,在初始分析运行后并未计算测量。这种情况下,可再次运行该分析。
用作图法可绘制测量对时间或对另一测量的曲线。可创建一个具有多条测量曲线的图形来表示一组分析结果,或者可查看单个测量是如何随不同的结果集而变化的。也可用图形表示多个分析的多个测量。
PS:在分析期间,使用显示箭头可获得测量所作更改的直观表示。
用图形表示测量结果:
必须先运行分析,或从先前分析恢复结果,然后才能用图形表示测量结果。如果为动态测量选择某些评估方法,则必须在运行分析前创建测量。
1.单击 “测量”(Measures)。“测量结果”(Measure Results) 对话框打开。
2.从“图形类型”(Graph type) 选项列表中选择“测量与时间”(Measure vs. time) 或“测量与测量”(Measure vs. measure)。
3.从列表中选择“测量 X 轴”(Measure for X-axis) 类型。
4.从“测量”(Measures) 列表中选择一个测量,或单击 新建 创建新测量。
5.在“结果集”(Result set) 下,从当前会话中选择一个或多个分析结果集。
6.要使用已保存的结果集,请单击 打开并从“选择回放文件”(Select playback file) 对话框中选择已保存的结果文件。
7.如果之前选择了多个测量或多个结果集,请单击或清除“分别绘制测量图形”(Graph measures separately) 复选框以分别绘制测量图形或将多个测量绘制在一个图形中。
8.单击 在“图表工具”(Chart-Tool) 中显示图形。如果这是在此会话中第一次用图形表示结果集的测量,则会在“主窗口”的消息区域显示此测量的进展情况。测量结果完成后,“图表工具”(Chart-Tool) 窗口随即打开。
9.要停止测量计算,请单击“消息”区域中的 。“测量结果”(Measure Results) 对话框打开。
10.设置“图表工具”(Chart-Tool) 窗口中的各选项来更改图形显示方式、导出图形或打印图形。
11.您可以同时查看分析回放和跟踪测量的值。当测量计算完成后,关闭“测量结果”(Measure Results) 对话框,但不要关闭“图表工具”(Chart-Tool) 窗口。
关于测量结果对话框:
使用“测量结果”(Measure Results) 对话框设置分析结果集的图形、查看测量结果以及创建新的测量。
•单击 “测量”(Measures) 打开“测量结果”(Measure Results) 对话框。从“图形类型”(Graph Type) 区域的列表中选择“测量与时间”(Measure vs. Time) 或“测量与测量”(Measure vs. measure)。选项会因所选图形类型的不同而不同:
◦要定义出图的 Y 轴,请从“测量”(Measures) 表中为选定结果集选择任意现有测量以及它们的值和状况。如果选择多个度量,图形会对每个测量显示不同颜色的曲线。
◦定义“测量与测量”(Measure vs. measure) 图形时,请为出图的 X 轴选择测量。
◦当“分别绘制测量图形”(Graph measures separately) 复选框被选择时,每个出图将显示在单独的图形上。最多可单独显示 9 个图形。
•要绘制已保存的结果集,请在“结果集”(Result Set) 区域从先前运行的分析中选择一个或多个结果集。每条曲线都以不同的颜色显示。如果未列出任何结果集,请选择下列任一选项:
◦单击 打开。“选择回放文件”(Select Playback File) 对话框随即打开。从已保存的结果集列表中选择一个文件,单击“打开”(Open)。选定的文件就出现在“测量”(Measure) 表中的结果集列表中。
◦单击 用图形表示选定结果集的选定测量。如果首次已在此会话中选择了结果集,则单击 时,软件会在“主窗口”的“消息”区域显示测量进度。
测量结果完成后,“图表工具”(Chart-Tool) 窗口随即打开。用此窗口中的选项可更改图形的显示、打印图形或以表格形式保存图形。如果选择了状况为“未计算”(Not Computed) 的一个或多个测量,则不能使用绘制选项。
•单击  根据选定的测量和分析创建参数。该参数将被赋予一个默认名称 (MDO_measure_name)。如果是第一次从某个测量来创建参数,则会在该分析的最后时间步距处向该参数提供测量值。参数值将保持不变,直至用户在“测量结果”(Measure Results) 对话框中更新此值或在“参数”(Parameters) 对话框中更改此值。
根据选定的测量和分析创建参数。该参数将被赋予一个默认名称 (MDO_measure_name)。如果是第一次从某个测量来创建参数,则会在该分析的最后时间步距处向该参数提供测量值。参数值将保持不变,直至用户在“测量结果”(Measure Results) 对话框中更新此值或在“参数”(Parameters) 对话框中更改此值。
如果创建参数,然后重新运行分析,则必须选择测量和分析并单击 ,用新分析的值更新参数值。
也可使用“测量结果”(Measure Results) 对话框来创建、编辑、复制和删除测量。
PS:有关参数的信息,请在“帮助中心”中进行搜索。
关于与模型图元关联的测量:
此表根据您选择以定义测量的模型图元的类型来组织测量。
|
图元
|
测量
|
|---|---|
|
点
|
位置
速度
加速度
间隔:距离、速度、速度变化
|
|
运动轴
|
位置
速度
加速度
净载荷
|
|
接头连接
|
连接反作用
碰撞
冲量
|
|
凸轮从动机构连接
|
凸轮:曲率、压力角、滑动速度
连接反作用
碰撞
冲量
|
|
槽从动机构连接
|
连接反作用
碰撞
冲量
|
|
齿轮副连接
|
连接反作用
|
|
弹簧、阻尼器、力、扭矩、伺服电动机、执行电动机
|
净载荷
|
创建测量:
用“测量结果”(Measure Results) 对话框中的以下选项可对测量进行创建、编辑、复制和删除操作:
•单击 新建 创建新测量。“测量定义”(Measure Definition) 对话框打开。如果有 Mechanism Dynamics 许可证,就可创建几种测量类型。运行分析前可能必须创建测量,这取决于选择的评估方法。
如果没有 Mechanism Dynamics 许可证,仅可创建的测量有“位置”(Position)、“速度”(Velocity)、“加速度”(Acceleration)、“分离”(Separation) 或“凸轮”(Cam) 测量,以及不需要质量定义的任何“系统”(System) 和“主体”(Body) 测量。
•要编辑测量,选择一个测量并单击  。“测量定义”(Measure Definition) 对话框随即打开,并显示选定测量的信息。
。“测量定义”(Measure Definition) 对话框随即打开,并显示选定测量的信息。
•单击  复制选定测量。选定测量的副本出现在列表中。测量按字母顺序列出。
复制选定测量。选定测量的副本出现在列表中。测量按字母顺序列出。
•单击 从列表中删除一个或多个选定测量。
PS:在以前的版本中,Mechanism Design 会在您打开“测量结果”(Measure Results) 对话框后,将“自由度”(Degrees of Freedom) 和“冗余”(Redundancies) 作为默认测量列出。如果机构是在以前的版本中创建的,那么在当前版本中打开模型时,预定义的“自由度”(Degrees of Freedom) 和“冗余”(Redundancies) 测量将出现在列表中,但现在您可对其进行编辑或者从列表中将其删除。
测量类型:
在“测量结果”(Measure Results) 对话框中单击 新建 时,会打开“测量定义”(Measure Definition) 对话框。可创建特定模型图元或整个机构的测量。还可以包括基于自己的表达式的测量,以实现用户自定义测量。
只要具有 Mechanism Dynamics 许可证,便可创建任何这些测量。如果没有许可证,则仅可创建“位置”(Position)、“速度”(Velocity)、“加速度”(Acceleration)、“分离”(Separation)、“凸轮”(Cam) 测量,以及任何不需要质量的“系统”(System) 及“刚性主体”(Rigid body) 测量。
•“位置”(Position) - 在分析期间测量点、顶点或运动轴的位置。
•“速度”(Velocity) - 在分析期间测量点、顶点或运动轴的速度。
•“加速度”(Acceleration) - 在分析期间测量点、顶点或运动轴的加速度。
•“连接反作用”(Connection reaction) - 测量接头、齿轮副、凸轮从动机构或槽从动机构连接处的反作用力和力矩。
•净载荷 (Net Load) - 测量弹簧、阻尼器、伺服电动机、力、扭矩或运动轴上强制载荷的模。还可确认执行电动机上的强制载荷。
•“测力计反作用”(Loadcell reaction) - 在力平衡分析期间测量测力计锁定上的载荷。
•“冲击”(Impact) - 确定分析期间是否在接头限制、槽端处或两个凸轮间发生冲力。
•“冲量”(Impulse) - 测量由碰撞事件引起的动量变化。可测量有限制的接头、允许升离的凸轮从动机构连接或槽从动机构连接的冲量。
•“系统”(System) - 测量描述整个系统行为的多个数量。
•“刚性主体”(Rigid body) - 测量描述选定刚性主体行为的多个量。
•“分离”(Separation) - 测量两个选定点之间的分离距离、分离速度及分离速度变化。
•“凸轮”(Cam) - 测量凸轮从动机构连接中任一凸轮的曲率、压力角和滑动速度。
•“用户定义”(User defined) - 将测量定义为包括测量、常数、算术运算符、参数和代数函数在内的数学表达式。
PS:表达式不得超过 1023 个字符。
关于位置、速度和加速度测量:
可创建测量来计算装配中的点或运动轴的位置、速度或加速度。
要在“测量定义”(Measure Definition) 对话框中定义位置、速度或加速度测量,则必须指定模型上的一个运动轴或一个点、方向矢量的一个分量以及一种评估方法。
如果选择一个点,则也必须选择一个坐标系作为位置、速度或加速度矢量方向的参考系。可选择 WCS、LCS 或 UCS。在选定的点上将出现一个红色箭头,指示在计算过程中实际使用的 X、Y 或 Z 轴的方向。如果分量是“大小”(Magnitude),则不出现箭头。仔细考虑此方向是否确实是所需测量的方向。
如果选择一个运动轴,则测量的值便是在运动轴的 DOF 允许的方向上的位置、速度或加速度。选择运动轴后,会出现一个红色箭头。箭头指向平移运动轴的 DOF 的方向。对于旋转运动轴,将显示一个与运动轴平行的双箭头,指示旋转方向。
可创建位置测量,例如,如果想确定活塞冲程的最大和最小位置。如果定义一个具有执行电动机的活塞,则在动态分析过程中,可使用速度或加速度测量来跟踪速度或加速度的变化。例如,如果要调整电动机的大小,则可以使用上述测量来校验运动轴是否具有足够的速度和加速度。如果用图形来显示速度和加速度,且它指示运动轴移动太慢,则应用到机构上的力可能不够。
要创建槽从动机构脉冲测量:
1.单击 “测量”(Measures)。“测量结果”(Measure Results) 对话框打开。
2.单击新建 。“测量定义”(Measure Definition) 对话框打开。
3.为测量输入一个描述性名称或接受默认名称。
4.在“类型”(Type) 下选择“冲量”(Impulse)。
5.单击 并在模型中选择槽从动机构连接。槽从动机构连接的名称显示在“运动轴或凸轮”(Motion axis or cam) 框中。
6.从“在极限处计算”(Computed at Limit) 列表中选择“最小”(Minimum) 或“最大”(Maximum)。
7.接受“每个时间步长”(Each time step) 为计算方法。
8.单击“确定”(OK)。
9.用图形表示测量。
销钉连接反作用分量的测量:
销钉连接允许绕一个轴旋转。可测量销钉连接以下分量之一:
•“轴向力”(Axial force) - 旋转轴 (Z) 方向上的力分量。
•“轴向力矩”(Axial moment) - 绕旋转轴 (Z) 的力矩。
•“径向力”(Radial force) - 与旋转轴垂直的平面中的力的模。该力的作用是相向或相背地拉动两个通过销钉连接的刚性主体。
•“径向力 X”(Radial force X) - X 方向上的力分量。
•“径向力 Y”(Radial force Y) - Y 方向上的力分量。
•“径向力矩”(Radial moment) - 与旋转轴垂直的平面中的力矩的模。此力矩可使销钉连接轴偏离已定义的位置。
•“径向力矩 X”(Radial moment X) - 与旋转轴垂直的平面中的力矩的 X 分量。
•“径向力矩 Y”(Radial moment Y) - 与旋转轴垂直的平面中的力矩的 Y 分量。
选择销钉连接以及除“径向力”(Radial force) 或“径向力矩”(Radial moment) 之外的任何分量时,会在连接上出现一个着色箭头,指示作用的正方向。仔细考虑此方向实际上是否是所需的力或力矩的方向。
PS:如果模型是着色的,则着色可能会将箭头隐藏起来。选择“线框”(Wireframe)、“隐藏线”(Hidden Line) 或“消隐”(No Hidden) 显示选项可使箭头可见。
滑块连接反作用分量的测量:
滑块连接允许沿一个轴平移。软件为平移轴 Z 加上标签。用户可测量滑块连接的以下分量之一:
•“轴向力”(Axial force) - 平移轴 (Z) 方向上的力分量。
•“轴向力矩”(Axial moment) - 绕平移轴 (Z) 的力矩。
•“横向力”(Lateral force) - 与平移轴垂直的平面中的力的模。
•“横向力 X”(Lateral force X) - X 方向上的力分量。
•“横向力 Y”(Lateral force Y) - Y 方向上的力分量。
•“横向力矩”(Lateral moment) - 与平移轴垂直的平面中的力矩的模。
•“横向力矩 X”(Lateral moment X) - 绕滑块 X 轴的力矩。
•“横向力矩 Y”(Lateral moment Y) - 绕滑块 Y 轴的力矩。
选择滑块连接和“横向力”(Lateral force) 或“横向力矩”(Lateral moment) 之外的任何分量时,会在连接上出现一个洋红色箭头,指示作用的正方向。仔细考虑此方向实际上是否是所需的力或力矩的方向。
如果关注的是与平移方向垂直的反作用力,可使用横向力测量。如果关注的是与平移方向垂直的力矩,可使用横向力矩测量。如果关注的是能绕平移轴产生旋转的扭矩,则使用轴向力矩测量。
PS:如果模型是着色的,则着色可能会将箭头隐藏起来。选择“线框”(Wireframe)、“隐藏线”(Hidden Line) 或“消隐”(No Hidden) 显示选项可使箭头可见。
圆柱连接反作用分量的测量:
圆柱连接允许绕一个轴旋转和沿着它平移。可测量圆柱连接以下分量之一:
•“轴向力”(Axial force) - 旋转和平移轴 (Z) 方向上的力分量。
•“轴向力矩”(Axial moment) - 绕旋转和平移轴 (Z) 的力矩。
•“径向力”(Radial force) - 与旋转轴垂直的平面中的力的模。
•“径向力 X”(Radial force X) - X 方向上的力分量。
•“径向力 Y”(Radial force Y) - Y 方向上的力分量。
•“径向力矩”(Radial moment) - 与旋转轴垂直的平面中的力矩的模。
•“径向力矩 X”(Radial moment X) - 与旋转轴垂直的平面中的力矩的 X 分量。
•“径向力矩 Y”(Radial moment Y) - 与旋转轴垂直的平面中的力矩的 Y 分量。
选择圆柱连接和“径向力”(Radial force) 或“径向力矩”(Radial moment) 之外的任何分量时,会在连接上出现一个洋红色箭头,指示作用的正方向。仔细考虑此方向实际上是否是所需的力或力矩的方向。
PS:如果模型是着色的,则着色可能会将箭头隐藏起来。选择“线框”(Wireframe)、“隐藏线”(Hidden Line) 或“消隐”(No Hidden) 显示选项可使箭头可见。
球连接反作用分量的测量:
球连接允许在任意方向上进行旋转,不能进行线性移动。使用球连接作为连接反作用测量的分量时,可以选取测量“合力”(Total Force)、或“力 X”(Force X)、“力·Y”(Force Y) 或“力·Z”(Force Z)。
X、Y 和 Z 分量的方向由在“定义”(Definition) 对话框中的“表示为”(Expressed In) 列表中选定的第一个或第二个刚性主体的 LCS 决定 (如图所示)。
选择 X、Y 或 Z 分量后,会在选定刚性主体的球点处显示其刚性主体 LCS,因此,X、Y 或 Z 方向可见。
PS:当您运行分析回放时,这些力也会在球点处显示出来。
平面连接反作用分量的测量:
平面连接允许绕一个轴 (Z) 旋转,并允许沿着垂直于该旋转轴的两个轴平移。可测量平面连接的以下分量之一:
•“法向力”(Normal force) - 与由两个平移轴所定义的平面相垂直的力。法向力可将由平面连接所连接的两个刚性主体分开或将它们合在一起,具体取决于力的方向。
•“法向力矩”(Normal moment) - 绕旋转轴 (Z) 的力矩。
•“平面力 X”(Planar force X) - 接头平移轴所在平面中的力的 X 分量。
•“平面力 Y”(Planar force Y) - 垂直于旋转轴的平面中的力的 Y 分量。
•“平面力矩 X”(Planar moment X) - 沿着 X 平移轴的力矩。
•“平面力矩 Y”(Planar moment Y) - 沿着 Y 平移轴的力矩。
选择平面连接和任何分量时,会在连接上出现一个洋红色箭头,指示作用的正方向。仔细考虑此方向实际上是否是所需的力或力矩的方向。
PS:如果模型是着色的,则着色可能会将箭头隐藏起来。选择“线框”(Wireframe)、“隐藏线”(Hidden Line) 或“消隐”(No Hidden) 显示选项可使箭头可见。
轴承连接反作用分量的测量:
轴承连接允许沿着和围绕轴进行平移和旋转,围绕两个轴的旋转与第一个轴垂直。
如下图所示,轴承连接的 Z 轴被固定到第一个 (绿色) 刚性主体的 LCS 处,且可被定位到沿轴承平移轴的任何位置。只能相对于第一个 (绿色) 刚性主体的 LCS 定义有意义的“径向力 X”(Radial Force X) 和“径向力 Y”(Radial Force Y)。换句话说,不能相对于轴承平移轴定义“径向力 X”(Radial Force X),因为该轴被固定到了第一个 (绿色) LCS。
可以为轴承连接定义以下测量:
•“轴向力”(Axial force) -沿平移轴移动时的力分量 (“力 X”(Force X)、“力 Y”(Force Y) 和“力 Z”(Force Z))。
•“径向力 X”(Radial force X) 和“径向力 Y”(Radial force Y) - 垂直于连接的 Z 轴的平面上的力分量。
•合力
根据在“定义”(Definition) 对话框中定义的分量的类型,可能会得到以下结果:
•如果选择“径向力 X”(Radial force X) 或“径向力 Y”(Radial force Y),则连接图标处将显示第一个 (绿色) 刚性主体的轴线且 X 和 Y 方向清晰可见。
•如果选择“合力”(Total force)、“轴向力”(Axial force) 或“径向力”(Radial force),则值为标量,且不需要 LCS 参考。
选定“力 X”(Force X)、“力 Y”(Force Y) 或“力 Z”(Force Z) 时,连接图标,X、Y 和 Z 方向以及力的方向均清晰可见 (见下方)。
•选择轴承连接和“轴向力”(Axial Force) 时,会在连接上出现一个着色箭头,用以指示正方向。请仔细考虑此方向是否正确指示了要显示的力或力矩。
•如果模型是着色的,则着色可能会将箭头隐藏起来。选择“线框”(Wireframe)、“隐藏线”(Hidden Line) 或“消隐”(No Hidden) 显示可使箭头可见。
•运行回放文件时,这些力将在轴承点处显示出来。
焊接连接反作用分量的测量:
焊接连接可将两个刚性主体连接起来,但没有自由度。焊接连接没有运动轴。可测量焊接连接以下分量之一:
•“合力”(Total force) - 反作用力的模。
•“力 X”(Force X) - X 方向上的力分量。
•“力 Y”(Force Y) - Y 方向上的力分量。
•“力 Z”(Force Z) - Z 方向上的力分量。
•“合力矩”(Total moment) - 反作用力矩的模。
•“分力矩 X”(Moment X) - 绕 X 轴的力矩。
•“分力矩 Y”(Moment Y) - 绕 Y 轴的力矩。
•“分力矩 Z”(Moment Z) - 绕 Z 轴的力矩。
选择焊接连接和“合力”(Total force) 或“总力矩”(Total moment) 之外的任何分量时,会在连接上出现一个洋红色箭头,指示分量的正方向。仔细考虑此方向实际上是否是所需的力或力矩的方向。
PS:如果模型是着色的,则着色可能会将箭头隐藏起来。选择“线框”(Wireframe)、“隐藏线”(Hidden Line) 或“消隐”(No Hidden) 显示选项可使箭头可见。
6DOF 连接反作用分量的测量
6DOF 连接允许沿三根轴平移同时绕其旋转。可测量 6DOF 连接的以下分量之一:
•“合力”(Total force) - 反作用力的模。
•“力 X”(Force X) - X 方向上的力分量。
•“力 Y”(Force Y) - Y 方向上的力分量。
•“力 Z”(Force Z) - Z 方向上的力分量。
•“合力矩”(Total moment) - 反作用力矩的模。
•“分力矩 X”(Moment X) - 绕 X 轴力矩的 X 分量。
•“分力矩 Y”(Moment Y) - 绕 Y 轴力矩的 Y 分量。
•“分力矩 Z”(Moment Z) - 绕 Z 轴力矩的 Z 分量。
选择 6DOF 连接和“合力”(Total force) 或“总力矩”(Total moment) 之外的任何分量时,会在连接上出现一个洋红色箭头,指示作用的正方向。仔细考虑此方向实际上是否是所需的力或力矩的方向。
PS:如果模型是着色的,则着色可能会将箭头隐藏起来。选择“线框”(Wireframe)、“隐藏线”(Hidden Line) 或“消隐”(No Hidden) 显示选项可使箭头可见。
一般连接的分量:
一般连接根据其定义方式允许不同的自由度。可测量一般连接以下分量之一:
•“合力”(Total force) - 反作用力的模。
•“力 X”(Force X) - X 方向上的力分量。
•“力 Y”(Force Y) - Y 方向上的力分量。
•“力 Z”(Force Z) - Z 方向上的力分量。
•“合力矩”(Total moment) - 反作用力矩的模。
•“分力矩 X”(Moment X) - 绕 X 轴力矩的 X 分量。
•“分力矩 Y”(Moment Y) - 绕 Y 轴力矩的 Y 分量。
•“分力矩 Z”(Moment Z) - 绕 Z 轴力矩的 Z 分量。
选择连接和“合力”(Total force) 或“总力矩”(Total moment) 之外的任何分量时,会在连接上出现一个洋红色箭头,指示作用的正方向。一定要仔细查看此方向,确定它实际上是否是所需的力或力矩的方向。
PS:如果模型是着色的,则着色可能会将箭头隐藏起来。选择“线框”(Wireframe)、“隐藏线”(Hidden Line) 或“消隐”(No Hidden) 显示选项可使箭头可见
槽从动机构连接反作用分量的测量:
可选择槽从动机构连接反作用的以下分量之一。所有分量均相对于笛卡尔坐标系。
•力 X (Force X) - 测量在槽从动机构到达槽的一个端点时沿 X 轴施加的力。
•力 Y (Force Y) - 测量在槽从动机构到达槽的一个端点时沿 Y 轴施加的力。
•力 Z (Force Z) - 测量在槽从动机构到达槽的一个端点时沿 Z 轴施加的力。
•合力 (Total Force) - 测量在槽从动机构到达槽的一个端点时所施加的合力。
•法线 (Normal) - 测量由摩擦产生的垂直于槽从动机构而施加的力,施力点位于与槽曲线的接触点。
•切向 (Tangential) - 测量由摩擦产生的相切于槽曲线而施加的力,施力方向与从动机构沿槽曲线的运动方向相反。
PS:创建槽从动机构连接时,必须指定摩擦系数,并针对分析启用摩擦,以测量“法向”(Normal) 及“切向”(Tangential) 分量。
刚性主体角速度、角加速度和质心测量分量:
可测量刚性主体角速度、角加速度以及质心测量的下列分量之一:
•“大小”(Mag) - 角速度、角加速度或质心位置的大小。
•X - 角速度、角加速度或质心位置在选定坐标系 X 轴方向上的分量。
•Y - 角速度、角加速度或质心位置在选定坐标系 Y 轴方向上的分量。
•Z - 角速度、角加速度或质心位置在选定坐标系 Z 轴方向上的分量。
默认坐标系是基础主体 WCS。也可在机构中的其它刚性主体上选择坐标系。
刚性主体质心惯量测量分量:
“刚性主体质心惯量测量”相对于选定参考系,并按照在选定坐标系中的表达形式报告刚性主体的质心惯量。创建质心惯量测量时,必须指定以下选项:
•元件
◦Ixx - 在选定坐标系中与 X 轴对齐的分量。
◦Iyy - 在选定坐标系中与 Y 轴对齐的分量。
◦Izz - 在选定坐标系中与 Z 轴对齐的分量。
◦Ixy - 选定坐标系中 XY 平面上的分量。
◦Ixz - 选定坐标系中 XZ 平面上的分量。
◦Iyz - 选定坐标系中 YZ 平面上的分量。
•参考
◦COM - 计算刚性主体质心处的质心惯量。
◦LCS - 计算选定刚性主体局部坐标系处的质心惯量。
•坐标系 (Coordinate System) - 接受默认坐标系 (基础主体 WCS),或在机构中其它刚性主体上选择坐标系。在选定坐标系中表示质心惯量值。
刚性主体方向测量分量:
刚性主体“方向”(Orientation) 测量相对于选定的参考坐标系报告刚性主体 LCS 的方向。可测量三个欧拉旋转角其中之一。旋转按以下顺序进行定义:
•绕参考坐标系 X 轴的“旋转 1”
•绕新 Y 轴的“旋转 2”
•绕新 Z 轴的“旋转 3”
默认坐标系是基础主体 WCS。也可在任意刚性主体上选择坐标系。
系统线性动量、角动量和质心测量的分量
可测量系统线性动量、角动量或质心测量的下述分量之一:
•“大小”(Mag) - 线性动量、角动量或质心位置的大小。
•X - 线性动量、角动量或质心在选定坐标系 X 轴方向的分量。
•Y - 线性动量、角动量或质心在选定坐标系 Y 轴方向的分量。
•Z - 线性动量、角动量或质心在选定坐标系 Z 轴方向的分量。
将相对于基础主体 WCS 来报告测量。
系统质心惯量分量的测量:
创建总质心惯量测量时,必须指定以下选项。所有元件在 WCS 坐标系中表示。
•元件
◦Ixx - 与基础主体 WCS 中的 X 轴对齐的分量。
◦Iyy - 与基础主体 WCS 中的 Y 轴对齐的分量。
◦Izz - 与基础主体 WCS 中的 Z 轴对齐的分量。
◦Ixy - 基础主体 WCS 中 XY 平面上的分量。
◦Ixz - 基础主体 WCS 中 XZ 平面上的分量。
◦Iyz - 基础主体 WCS 中 YZ 平面上的分量。
•参考
◦WCS - 计算基础主体 WCS 原点处的质心惯量。
◦COM - 计算机构质心处的质心惯量。
关于刚性主体测量:
可通过多种预定义测量来测量机构中所选刚性主体的行为。如果具有 Mechanism Dynamics 许可证,则可创建以下所有类型的刚性主体测量。否则,只能创建“方向”(Orientation)、“角速度”(Angular Velocity) 或“角加速度”(Angular Acceleration)。
•“方向”(Orientation) - 相对于选定坐标系测量刚性主体 LCS 的方向。
•“角速度”(Angular velocity) - 相对于选定坐标系测量刚性主体的绝对角速度。
•“角加速度”(Angular acceleration) - 相对于选定坐标系测量刚性主体的绝对角加速度。
•“质量”(Mass) - 测量刚性主体的总质量。
•“重量”(Weight) - 测量刚性主体的总重量。将用质量和已定义的重力加速度的乘积来计算重量。必须为分析启用重力才能测量刚性主体重量。
•“质心”(Center of mass) - 相对于选定坐标系测量刚性主体的质心位置。
•“质心惯量”(Centroidal inertia) - 测量刚性主体质心的惯量。
创建刚性主体测量:
1.单击 “测量”(Measures)。“测量结果”(Measure Results) 对话框打开。
2.单击新建 。“测量定义”(Measure Definition) 对话框打开。
3.为测新建量键入一个描述性名称或接受默认名称。
4.在“类型”(Type) 下选择“刚性主体”(Rigid Body),并使用 选择刚性主体。
5.从“属性”(Property) 列表中,选择下列选项之一
:
◦方向
◦“角速度”(Angular velocity)
◦“角加速度”(Angular acceleration)
◦质量
◦重量
◦“质心”(Center of mass)
◦“质心惯量”(Centroidal inertia)
属性单位显示在“类型”(Type) 下面。
6.必要时,选择一个分量进行测量,并选择一个参考系表示测量。
7.如果选择了“方向”(Orientation)、“角速度”(Angular velocity)、“角加速度”(Angular acceleration) 或“质心惯量”(Centroidal inertia),则请从列表中选择一个评估方法:
◦“每个时间步长”(Each time step)
◦最大值
◦最小值
◦平均值
◦整数
◦“均方根”(Root mean square)
◦“定时”(At time)
8.如果选择“定时”(At time),请在“时间”(Time) 输入框内输入一个大于零的实数。
9.用图形表示测量。
10.单击“确定”(OK)。
关于间隔测量:
间隔测量根据在机构中选择的两个点或顶点之间的间隔报告值。可创建以下类型的间隔测量:
•“距离”(Distance) - 测量机构中两选定点之间距离的绝对值。
•“速度”(Speed) - 测量分离距离的变化率。当两点彼此远离而移动时此值为正,当两点彼此相对而移动时此值为负。
•“速度变化”(Change in Speed) - 测量分离速度的变化率。
创建间隔测量:
1.单击 “测量”(Measures)。“测量结果”(Measure Results) 对话框打开。
2.单击 新建。“测量定义”(Measure Definition) 对话框打开。
3.为测量键入一个描述性名称或接受默认名称。
4.从“类型”(Type) 列表中选择“分离”(Separation)。
5.单击 并在机构上选择两个基准点或顶点。
6.选择一种分离类型:
◦距离
◦速度
◦速度变化
7.选择一种评估方法:
◦“每个时间步长”(Each time step)
◦最大值
◦最小值
◦平均值
◦整数
◦“均方根”(Root mean square)
◦“定时”(At time)
8.如果选择“定时”(At Time),请在“时间”(Time) 输入框内输入一个大于或等于零的实数值。
9.单击“确定”(OK)。
10.用图形表示测量。
关于用户定义测量:
通过定义包括参数、常数及现有的标准测量或用户定义测量的表达式,可创建自定义测量。创建一个用户定义的测量,以测量无法使用标准测量轻松计算出的值。从算术运算符和数学函数的库中选择用于定义表达式的运算符和函数。
PS:
•表达式不得超过 1023 个字符。
•表达式可以是由一个或多个变量 (包括时间和测量) 组成的函数,但不能在用户定义的测量表达式中包含分析特征。
例如,要计算一个圆的面积,该圆的直径由模型上两点之间的间隔定义。
1.创建距离分离测量 sep_point。
2.为用户定义的测量 (如 pi*(0.5*sep_point)^2) 定义表达式。
此表达式使用乘法运算符 *、取幂运算符 ^ 和常数 pi,以及您定义的间隔测量。
创建用户定义测量:
1.单击 “测量”(Measures)。“测量结果”(Measure Results) 对话框打开。
2.单击新建 。“测量定义”(Measure Definition) 对话框打开。
3.为测量键入一个描述性名称或接受默认名称。
4.在“类型”(Type) 下,选择“用户定义”(User defined)。
5.选择一个数量以指定测量的单位。
6.在输入框中输入表达式,或使用以下选项来定义表达式:
◦单击 可打开“运算符”(Operators) 对话框。
◦单击 可打开“常量”(Constants) 对话框。
◦单击 可打开“函数”(Functions) 对话框。
◦单击 可打开“变量”(Variables) 对话框。
◦单击 来检验表达式,并打开“表达式图形”(Expression Graph) 对话框。
7.在“评估方法”(Evaluation method) 对话框中选择一种评估方法:
◦“每个时间步长”(Each time step)
◦最大值
◦最小值
◦平均值
◦整数
◦“均方根”(Root mean square)
◦“定时”(At time)
8.如果选择“定时”(At Time),请在“时间”(Time) 框内输入一个大于零的实数值。
9.单击“确定”(OK)。
10.用图形表示测量。
关于多个图形:
从“测量结果”(Measure Results) 对话框绘制测量结果图形时,有多个显示选项。可为一个结果集绘制多个测量图形,或用多个结果集绘制一个测量图形。根据是否选择“分别绘制测量图形”(Graph measures separately)复选框,显示结果会不同。选择多个测量或结果集的方式也会影响到将图形数据另存为表格时所使用的表格格式。使用以下表可帮助确定显示测量结果或将数据保存为表的最佳方式。
PS:“图表工具”(Chart-Tool) 窗口将保持打开状态,直到用户关闭该窗口或关闭“机构”(Mechanism) 选项卡。
|
测量数
|
结果集数
|
分别绘制测量图形
|
图表工具显示
|
|---|---|---|---|
|
一个
|
一个
|
Yes, No
|
一个图
|
|
两个或更多
|
一个
|
No
|
一个图,每个测量一条线
|
|
两个或更多
|
一个
|
是
|
多个图 – 每个测量一个
|
|
一个
|
两个或更多
|
No
|
一个图,每个结果集一条线
|
|
一个
|
两个或更多
|
是
|
多个图 – 每个结果集一个
|
|
两个或更多
|
两个或更多
|
No
|
一个图,每个测量结果集的组合一条线
|
|
两个或更多
|
两个或更多
|
是
|
每个测量一个图。每个图包含对应于每个结果集的一条线
|
关于图形显示:
要按此过程显示测量结果图以及定义电动机和受力曲线的函数,请单击以下任一对话框上的 :
•“伺服电动机定义”(Servo Motor Definition) 对话框中的“轮廓”(Profile) 选项卡中的“图形”(Graph)
•“执行电动机定义”(Force Motor Definition) 对话框上的“大小”(Magnitude)
•“力或扭矩定义”(Force or Torque Definition) 对话框上的“函数”(Function) 下的“大小”(Magnitude) 选项卡
•“测量结果”(Measure Results) 对话框
在显示图形后,可单击图形中的任意一点以在图形窗口的左下角显示该点的 X 和 Y 值。也可使用“图表工具”(Chart-Tool) 命令管理图形的外观。有关格式化图形的详细信息,请单击下面的相关链接。关于评估方法:
当定义动态测量时,可从多种计算方法中进行选取。在“测量结果”(Measure Results) 对话框中,测量图形和“值”(Value) 下显示的数量随计算方法的不同而异。下列选项对测力计反作用或凸轮反作用测量滑动分量不可用。
|
评估方法
|
值
|
图形 (Graph)
|
|---|---|---|
|
每个时间步长
|
最后一个时间步距的测量值
|
在分析的每个时间间隔计算的测量值
|
|
最大值
|
分析中的最大值
|
迄今为止在分析过程中出现的最大值
|
|
最小值
|
分析中的最小值
|
迄今为止在分析过程中出现的最小值
|
|
整数
|
最后一个时间步距的测量积分值
|
到达一个时间给定点的函数积分
|
|
平均值
|
最后一个时间步距的平均值
|
到达分析的每个时间步距的测量平均值
|
|
均方根
|
最后一个时间步距的均方根值
|
以给定的时间步距到达某点的测量均方根值
请参阅示例以获取均方根图形和平均值图形的比较。
|
|
定时
|
指定时间的测量值
|
指定时间用条形表示的测量值
|
对于“每个时间步长”(Each Time Step),可在运行分析后定义测量。对于其它方法,必须在运行分析前定义测量。运行分析后,如果以“最大”(Maximum)、“最小”(Minimum)、“整数”(Integral)、“平均”(Average)、“均方根”(Root Mean Square) 或“定时”(At Time) 计算方法定义测量,则在选择该分析时,“测量结果”(Measure Results) 对话框中的“状况”(Status) 列便会报告Not computed。
将在执行计算的每个间隔来报告发现的值。它们不必是相等的间隔。测量结果图形上的间隔不是计算结果时所使用的时间间隔。软件将对其计算进行调整以保证结果精确。因此,动态分析可能不会使用指定的间隔。
因为分析(在其中对数量进行测量)的变化迅速,所以取样率较大。例如,要精确计算一个碰撞事件,软件将使用较大的取样率以接近碰撞发生的时间。定义动态分析时所指定的间隔将用作最大时间间隔步距。实际的间隔可能较小,这取决于计算的需求。
将使用装配公差设置来确定用于分析计算的时间间隔。公差越小,计算就越精确。
若要校验最小值或最大值的精度,则以较低的公差(更精确)重新运行分析并重复此操作,直到报告的最小值或最大值不再随运行的更改而显著发生变化。
关于按时间计算方法:
在“测量定义”(Measure Definition) 对话框中选择“按时间”(At Time) 后,还必须在分析期间指定时间。将于指定时间在“测量结果”(Measure Results) 对话框中报告针对选定结果集的测量。
关于积分评估方法:
“积分”(Integral) 值是数量到达某一点对时间的积分。如果标绘此值,则“积分号”(Integral) 曲线上给定点的值将与分析中同一点处相同数量的为“每个时间步距”(Each Time Step) 所标绘的曲线下的面积一致。
“积分”(Integral) 测量的单位是测量数量的单位乘以时间。例如,如果测量是速度,其单位是 m/sec,则积分测量的单位就是 m/sec * sec。
示例:计算方法:
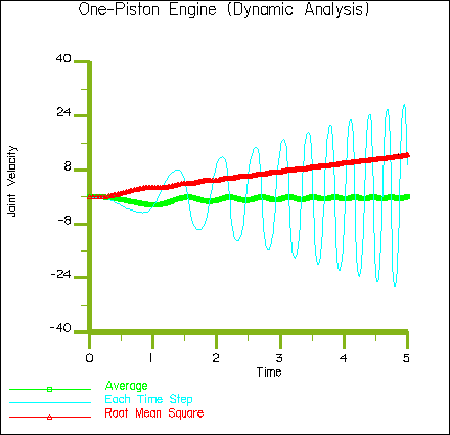
如果机构的运动包括绕零点对称振荡的值,则会用到“均方根值”(Root Mean Square)。
下图用图形表示了旋转运动轴的速度。这三个图使用了三种评估方法:“每个时间步长”(Each Time Step)、“平均”(Average) 和“均方根”(Root Mean Square)。随时间的持续,“平均”(Average) 趋近于零,而“均方根”(Root Mean Square) 保持正值,指示速度的模。
关于轨迹曲线:
单击“分析”(Analysis) > “轨迹曲线”(Trace Curve) 访问“轨迹曲线”(Trace Curve) 对话框并执行以下操作:
•记录轨迹曲线。轨迹曲线用图形表示机构中某一点或顶点相对于零件的运动。
•记录凸轮合成曲线。凸轮合成曲线用图形表示机构中曲线或边相对于零件的运动。
必须先从分析运行创建一个结果集,然后才能生成这些曲线。使用当前会话中的结果集,或通过装载先前会话中的结果文件,可生成轨迹曲线或凸轮合成曲线。
只生成位置的轨迹曲线和凸轮合成曲线。
使用轨迹曲线,可创建下列内容:
•凸轮轮廓
•Mechanism Design 中的槽曲线
•模型中的实体几何
关于轨迹曲线对话框:
单击“分析”(Analysis) > “轨迹曲线”(Trace Curve) 访问“轨迹曲线”(Trace Curve) 对话框并生成一条轨迹曲线或凸轮合成曲线。
•“纸零件”(Paper part) - 在装配或子装配上选择一个刚性主体作为描绘轨迹时的参考。如果想象纸上有一支笔描绘轨迹,可以将该零件认为是纸张。生成的轨迹曲线将是被选作纸张零件的那个零件的一个特征。可从“模型树”访问轨迹曲线和凸轮合成曲线。
要描绘刚性主体相对于基础的运动,可在基础中为纸张零件选择一个刚性主体。
•“追踪”(Trace) - 在列表中选择要生成的曲线类型:
◦“轨迹曲线”(Trace Curve) - 可使用选择器箭头在装配上选择一点、顶点或曲线端点。此点所在的刚性主体必须与为纸张零件所选定的刚性主体不同。该软件将使用此点的轨迹定义轨迹曲线。如果想象纸上有一支笔描绘轨迹,此位置就如同笔尖。
◦“凸轮合成曲线”(Cam synthesis curves) - 可使用选择器箭头在装配上选择一条曲线或边。此曲线所在的刚性主体必须与为纸张零件所选定的刚性主体不同。该软件使用此曲线的轨迹来生成内部和外部包络曲线。生成的每条凸轮合成曲线必须定义一个平面。
可选择开放曲线或封闭环,或多条连续曲线或边。系统将自动使所选的曲线变得光滑。
如果选择开放曲线,软件则在运动运行中以每个时间步长确定距离旋转轴最近和最远的两个点。将生成两条样条曲线,一条来自最近点的系列,另一条来自最远点的系列。
•2D 或 3D - 选择要生成的轨迹曲线类型:
◦2D - 2D 凸轮合成曲线
◦3D - 编辑 3D 轨迹曲线的显示
•结果集 (Result Set) - 从可用结果集列表中选择一个运动运行结果集。
•单击打开 ,从磁盘文件中加载一个已保存的结果集。当“选择回放文件”(Select playback file) 对话框随即打开时,从前面的会话中选择一个结果集,并单击“打开”(Open)。选定的结果集将出现在“轨迹曲线”(Trace Curve) 对话框的结果集列表中。选择要用于轨迹曲线的结果集。
•单击“确定”(OK),在纸张零件中创建一个基准曲线特征,为选定的结果集显示轨迹曲线或平面凸轮合成曲线。要保存基准曲线特征,必须保存该零件。
•单击“预览”(Preview),开始分析并生成轨迹曲线或凸轮合成曲线。
•单击“取消”(Cancel),退出“轨迹曲线”(Trace Curve) 对话框。
创建轨迹曲线:
在创建机构中某零件的运动轨迹曲线前,必须从分析生成一个结果集。
1.单击“分析”(Analysis) > “轨迹曲线”(Trace Curve)。“轨迹曲线”(Trace Curve) 对话框打开。
2.在“纸零件”(Paper part) 下,单击 并选择一个刚性主体作为参考来追踪曲线。
3.在“轨迹”(Trace) 下,选择“轨迹曲线”(Trace curve) 或“凸轮合成曲线”(Cam synthesis curves)。
4.如果选择“轨迹曲线”(Trace curve):
a.单击 并在另一个刚性主体上选择点或顶点。
b.在“曲线类型”(Curve type) 下,选择 2D 或 3D
5.如果选择“凸轮合成曲线”(Cam synthesis curves),则在另一个刚性主体上选择曲线或边,或一系列连续的曲线或边。
6.从可用的结果集列表中选择一个“结果集”(Result set)。如果要使用先前保存的结果集,请单击 打开 并从“选择回放文件”(Select playback file) 对话框中选择一个结果集。
7.如果要查看轨迹曲线或凸轮合成曲线,单击“预览”(Preview)。
8.单击“确定”(OK),在纸张刚性主体中创建一个用于当前轨迹曲线的基准曲线特征。
PS:如果要保存基准曲线特征,必须在“机构设计”中保存该零件。
编辑 3D 轨迹曲线:
生成 3D 轨迹曲线时,软件保存一系列隐藏的基准点,并将它们与轨迹曲线和基准平面放入同一组中。轨迹曲线组作为纸张零件的一个特征来保存。
可在“模型树”中访问此组,以删除或修改基准点的坐标。选择包含点的特征,然后右键单击并从快捷菜单中选取“编辑定义”(Edit Definition)。使用打开的对话框编辑轨迹曲线。
在“模型树”上单击“显示”(Show) > “层树”(Layers Tree) 以更改和保存轨迹曲线层的显示状态。
有关层和重新定义特征的详细信息,请在“帮助中心”中进行搜索。